![]()
![]()
![]()
![]()
![]()
![]()
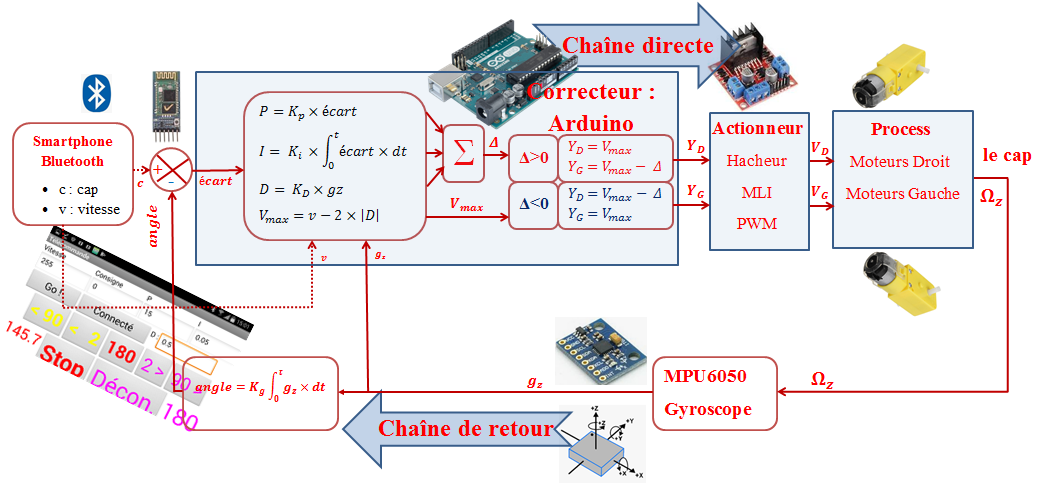
Commande des moteurs et Correction()
Initialisation des moteurs
void iniMoteur() {
pinMode(Da, OUTPUT); pinMode(Db, OUTPUT); // Commande moteur droit
pinMode(Ga, OUTPUT); pinMode(Gb, OUTPUT); // Commande moteur gauche
} // iniMoteur()
Fonction Moteur(droite,gauche)
void Moteur(int droite, int gauche) {
if (droite>0) {analogWrite(Db,0);analogWrite(Da,droite);}
else {analogWrite(Db,-droite);analogWrite(Da,0);}
if (gauche>0) {analogWrite(Gb,0);analogWrite(Ga,gauche);}
else {analogWrite(Gb,-gauche);analogWrite(Ga,0);}
} // Moteur()
Fonction Correction(consigne)
void correction(int consigne) {
ecart=consigne-angle;
// Le compteur précis permet de valider l'exécution d'une consigne
if (abs(ecart)<10) precis++; else precis=0;
P=Kp*ecart;
I=I+Ki*ecart*(dt/1000); // Somme des écarts : correction intégrale
D =Kd*gz; // La correction dérivée utilise directement la vitesse angulaire du capteur
if (I>70) I=70; // Mise en place de butée pour limiter l'instabilité de la correction I
if (I<-70) I=-70;
delta=P+I+D; // la correction PID
Vmax=vitesse-2*abs(D);
// Pour les virages <90° diminuer delta pour faire des virages moins brusques...
if (delta>100+abs(consigne/10) && abs(consigne)<900) delta=100+abs(consigne/10);
if (delta<-100-abs(consigne/10) && abs(consigne)<900) delta=-100-abs(consigne/10);
if (delta >0) { // delta >0 => Il faut mettre plus de puissance sur le moteur Droite
Droite = Vmax;
Gauche = Vmax - abs(delta); // Moins de puissance sur le moteur Gauche
}
else { // delta <0 => Il faut mettre plus de puissance sur le moteur Gauche
Gauche = Vmax;
Droite = Vmax - abs(delta); // Moins de puissance sur le moteur Droite
}
if (Droite>Vmax) Droite=Vmax;
if (Droite<-Vmax) Droite=-Vmax;
if (Gauche>Vmax) Gauche=Vmax;
if (Gauche<-Vmax) Gauche=-Vmax;
Moteur(Droite,Gauche);
} // correction()