





RobotGyro : un projet qui file droit !
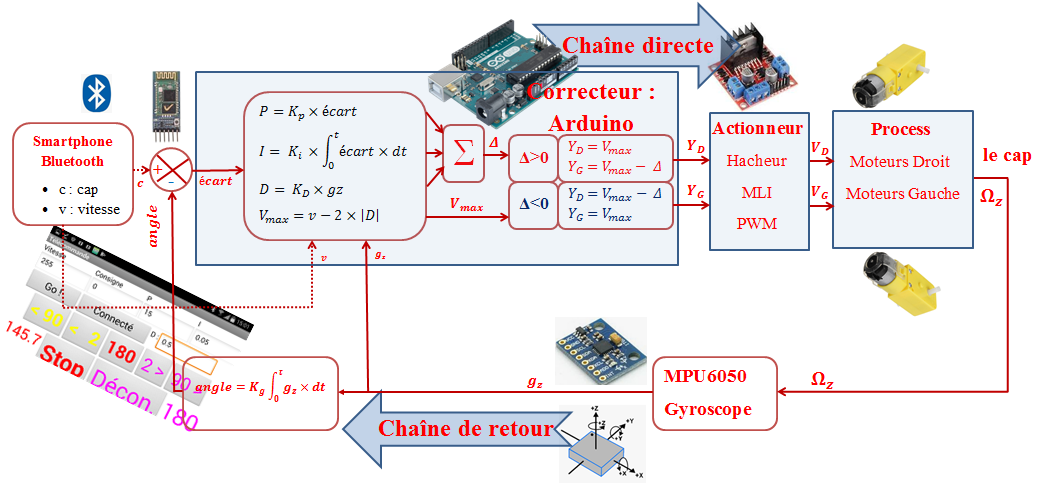
Cahier des charges :Les robots à plusieurs moteurs sont pratiques à manoeuvrer mais ne vont pas droit ! A l'aide d'un MPU6050 et de la sortie de son gyroscope gz :
|
|

Le synoptique :
 Le
challenge :
Le
challenge :
Réaliser le plus rapidement possible le parcours suivant :
- Départ : entrer par la porte du fond de la J101
- Arrivée : sortir par la porte de devant de la J101
objectif : faire un meilleur chrono que les 2TPIL !

Comment mesurer l'angle de lacet (yaw) avec le MPU6050 ?
|
Les bibliothèques à inclure pour utiliser le MPU6050 sont : MPU6050, I2Cdev et Wire. Une petite vidéo de présentation : U=RI | Arduino Ep.19 - La centrale inertielle MPU-6050 Pour notre part c'est uniquement la vitesse angulaire gz qui nous intéresse.
Attention : le format int est en dépassement au delà de 32768 d'où l'utilisation d'un format long . |
// Bibliothèques utilisées et variables globales
#include "I2Cdev.h"
#include "MPU6050.h"
#include "Wire.h"
MPU6050 gyro;
int gx, gy, gyz;
int offset,angle;
long Gz,gz; // risque de dépassement
|
|
Dans le setup nous allons appeler la fonction iniGyro() Pour sa première utilisation nous allons calibrer l'offset :
Après test, l'appel de la méthode
.getRotation
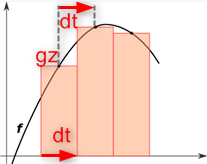
demande environ 1 ms. La période d'échantillonnage (dt=Te) doit être régulière et très petite devant la constante de temps du process. Cela permet de réduire l'erreur dans le calcul de l'intégrale par la méthode détaillée ci-dessous. |
void iniGyro() { // Pour initialiser le capteur dans le setup
Wire.begin();
gyro.initialize();
Gz=0;
/* Pour calibrer offset lors d'une première utilisation
Serial.println("Ne pas bouger, reglage offset...");
for (int i=0; i < 200; i++) { // on élimine les 200 premières mesures
gyro.getRotation(&gx, &gy, &gz);
delay(2);
}
for (int i=0; i < 1000; i++){
gyro.getRotation(&gx, &gy, &gz);
Gz+=gz;
delay(2);
}
offset=-(Gz/1000); // Moyenne sur 1000 mesures
Serial.println("Offset="+String(offset));
Gz=0; */
offset=173;
} // iniGyro()
|
|
Pour faire une intégration en analyse numérique, il
suffit de faire la somme des
Pour éviter le calcul de Kg, Mathieu a préféré utiliser la fonction map ... Après avoir fait faire un demi tour à notre robot, nous
avons trouvé Gz/1000 = 23380. |
void calculAngle() {
gyro.getRotation(&gx, &gy, &gyz);
gz=gyz+offset; // Correction Offset
Gz+=gz*(dt/1000); // somme (pour integration)
angle=map(Gz/1000,-23380,23380,-1800,1800);
} // calculAngle()
|


 Au
bilan les tests sont satisfaisants :
Au
bilan les tests sont satisfaisants :
- la dérive est faible,
- les mesures du yaw sont fiables, justes et fidèles au degrès près,
- si on limite un peu la vitesse de rotation, nous réalisons des demi-tours précis.
Nous pouvons donc valider cette centrale inertielle pour la suite du projet.
Comment structurer le programme ?
Le programme principal doit:
Comment respecter notre cadencement à 2 ms ?
Comment tester et débugger notre programme ?Dans un premier temps nous allons réaliser un parcours simple : aller tout droit. Puis un parcours plus élaboré :
Comment contrôler la bonne exécution de notre consigne ?Pour effectuer notre Demi-Tour nous exécutons
correction(1800)
|
void setup() {
Serial.begin(9600);
delay(500);
iniMoteur(); // initialisation des pinMode Moteur
iniGyro();
} // setup()
void loop() {
t0=micros(); // top départ
calculAngle();
if (n%100==50) lireSerie();
if (vitesse>0) telecommande();
else Moteur(0,0);
if (n%100==0) debug();
while (micros()-t0<dt); // loop() cadencée à dt µs
n++;
} // loop()
// Calcule l'angle de lacet grâce au MPU6050
void calculAngle() {}
// Transmet par port série les paramètres
void debug() { }
// Reçoit les consignes
void lireSerie () {}
// Pilote les moteurs
void Moteur(int droite, int gauche) {}
// Correcteur PID (cf le synoptique)
void correction(int consigne) {}
// Parcours test : 6s en MA, DT, 6s MA, DT, STOP.
void allerRetour() {}
// Parcours piloté par la télécommande
void telecommande() {}
|
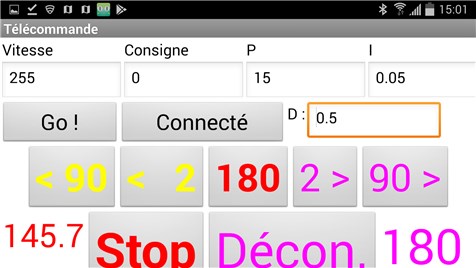
La télécommande
 Pour
prendre en main et tester le robot nous allons brancher un dongle
Bluetooth sur le PC.
Pour
prendre en main et tester le robot nous allons brancher un dongle
Bluetooth sur le PC.
Grâce au moniteur série nous allons tester notre programme Arduino à distance, en envoyant des trames du type :
255;0; soit : vitesse=255;cap=0°
Ainsi le moniteur série va nous aider à débugger le programme et à trouver les bons réglages du PID.
Pour la suite nous allons utiliser une télécommande programmée en Labview.
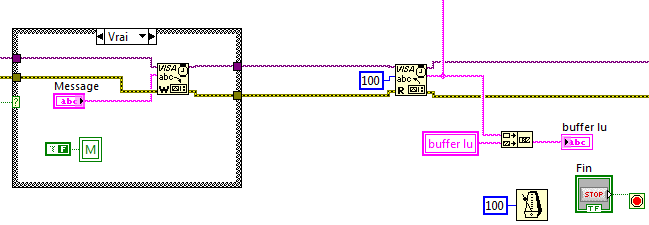
Pour transmettre des informations de l'arduino vers la télécommande, il faut :
- bien structurer la trame émise,
- respecter l'ordre d'émission,
- des expressions régulières ("c:", "A:" ...) permettent à la
télécommande de valider la trame reçue
et d'isoler les variables qui nous intéressent. - voici la fonction qui nous sert de base.
Pour être plus mobile, nous allons développer une appli télécommande pour notre smartphone avec appInventor.
