 Le
robot de mesure en milieu hostile
Le
robot de mesure en milieu hostile
Voici quelques pistes pour commencer :
-
Avec les TSTL (qui s’occupent de la partie mesure et étalonnage) concevoir un robot de mesures pour milieu hostile.
-
Mettre en oeuvre les capteurs choisis par les TSTL
-
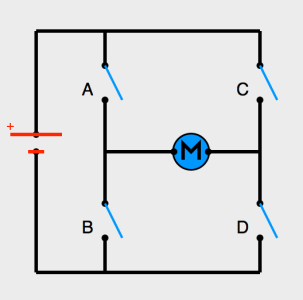
Mise en oeuvre d’un pont en H pour piloter les moteurs et élaboration du programme
-
Aide au pilotage : capteur à ultrason
-
Développer une télécommande sur une tablette à l'aide de App Inventor
-
Prévoir un mode exploration automatique.
Le blog des TSTL
Au Japon le vendredi 11 mars 2011 , un tsunami se produit à la
suite d’un séisme magnitude 9.
Cette catastrophe entraîne un accident nucléaire majeur à Fukushima.
Ce milieu devient donc hostile à toute vie humaine.
Un milieu hostile est un environnement dans lequel l'homme est
soumis à des agressions physiques (pression, bruit, température,
rayonnement, etc.) ou chimiques.
Des ingénieurs décident donc de créer un robot capable
d’affronter la radioactivité présente sur le site, qui serait
mortelle pour l’homme en moins d’une heure d’exposition.
Ce robot nommé Maestro est donc envoyé pour réparer certaines
parties de la centrale pour réduire les émissions radioactives.
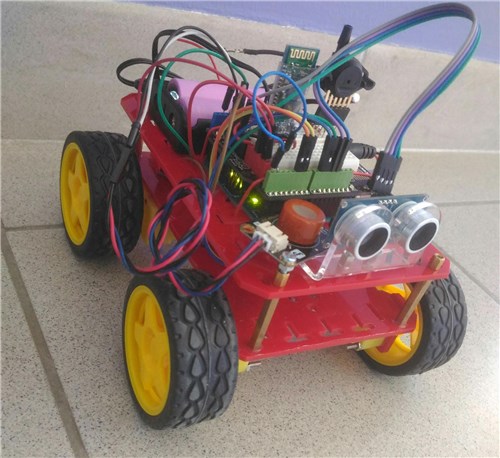
Après avoir vu un reportage sur cette catastrophe, nous avons décidé de créer notre propre robot à bas coût et à notre niveau pour explorer ce genre de milieu.
Nous avons pour objectif qu’il puisse remplacer l’action humaine.
Il permettra donc à l’homme de ne plus encourir les risques dus à ce
milieu et devra donc mesurer la température, la luminosité, la
quantité de gaz…
Nous nous sommes donc demandé quelles étaient les étapes permettant la réalisation d’un robot pouvant se rendre dans un milieu hostile.
![]()
Les conseils du Prof et ressources diverses :

![]()
Pour la variation de vitesse : revoir le principe du hacheur série et la sortie PWM
-
 DC
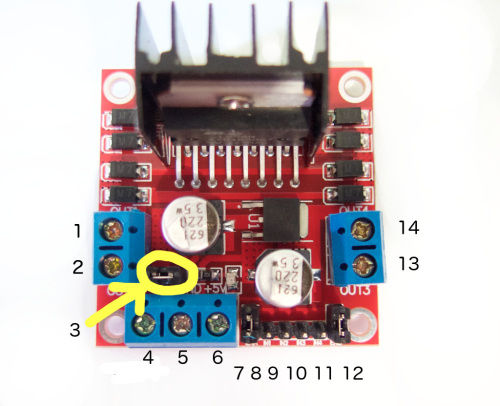
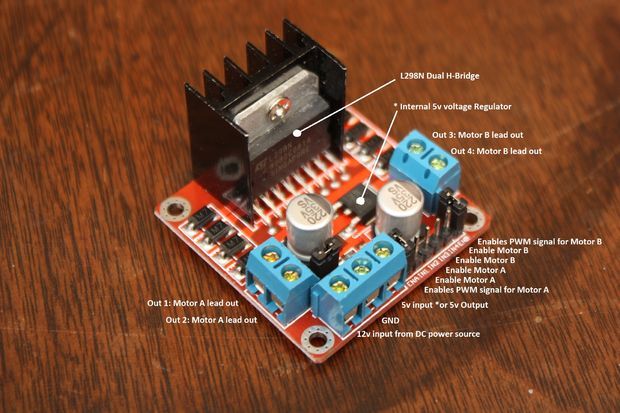
motor 1 “+”
DC
motor 1 “+” - DC motor 1 “-”
-
12V jumper – remove this if using a supply voltage greater than 12V DC. This enables power to the onboard 5V regulator
-
Connect your motor supply voltage here, maximum of 35V DC. Remove 12V jumper if >12V DC
-
GND
-
5V output if 12V jumper in place, ideal for powering your Arduino (etc)
-
DC motor 1 enable jumper. Leave this in place when using a stepper motor. Connect to PWM output for DC motor speed control.
-
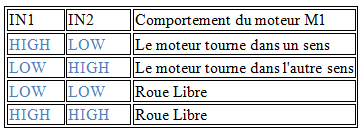 IN1
commande les interrupteurs A et D, sens 1 pour le moteur 1
IN1
commande les interrupteurs A et D, sens 1 pour le moteur 1 -
IN2 commande les interrupteurs C et B, sens 2 pour le moteur 1
-
IN3 commande les interrupteurs A et D, sens 1 pour le moteur 2
-
IN4 commande les interrupteurs C et B, sens 2 pour le moteur 2
-
DC motor 2 enable jumper. Leave this in place when using a stepper motor. Connect to PWM output for DC motor speed control
-
DC motor 2 “+”
-
DC motor 2 “-”
Conseil du prof : pour un
moteur <12 VDC ce qui est le cas pour notre robot, enlever aucun
cavalier (3,7 et 12).
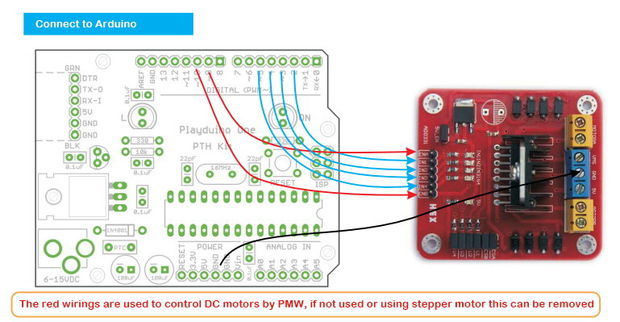
Pour faire varier la vitesse dans les 2 sens pour les 2 moteurs il
faudra 4 sorties PWM à relier de IN1 à IN4
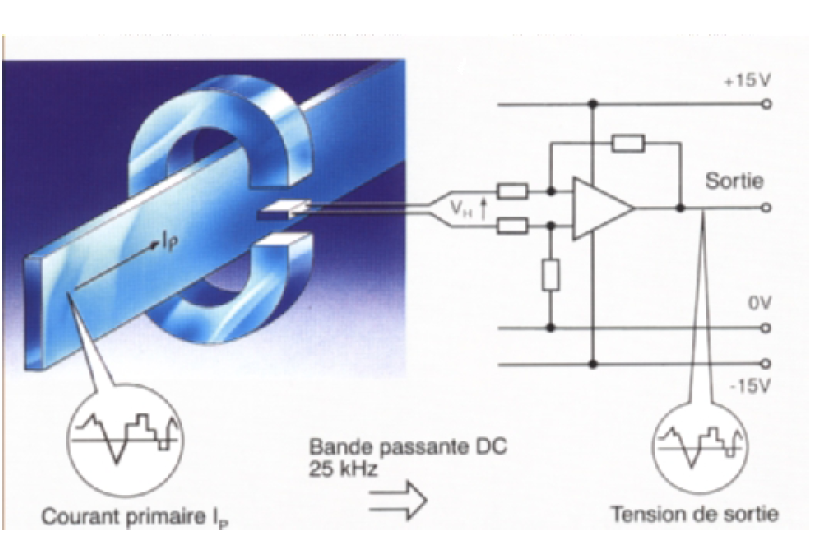
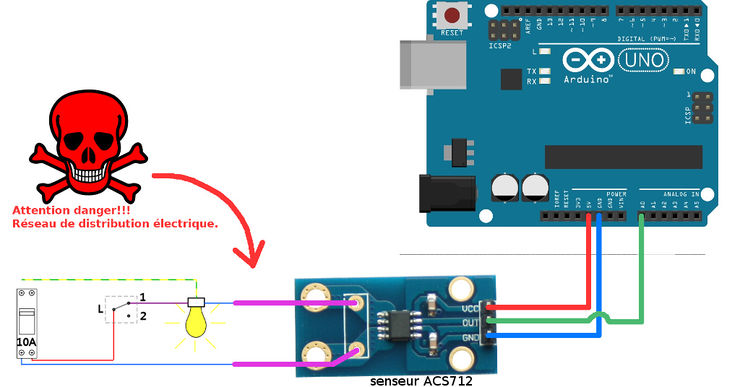 Capteur
à effet Hall ACS712 Courant 5 A AC ou
DC.
Capteur
à effet Hall ACS712 Courant 5 A AC ou
DC.