





Tracker solaire 2 axes :
 Les
mouvements de rotation se produisent selon deux axes (un vertical et
un horizontal).
Les
mouvements de rotation se produisent selon deux axes (un vertical et
un horizontal).
Deux servos moteurs commandés par la carte électronique Arduino
assure la mise en rotation.
L'orientation optimale est calculée à partir des données de 2 ou 3
photodiodes.
Voici quelques pistes pour commencer :
- maquette sur 2 axes à l'aide de 2 servos moteurs (cf le dossier 2 axes)
- utilisation de 2 ou 3 photodiodes BPW34 (cf ballon sonde)

 Le
blog de Jérémie et Mattéo
Le
blog de Jérémie et Mattéo
Projet 2016/2017 TPIL
Nous avons porté notre choix sur la création d’un Tracker Solaire dans le but d’optimiser l’utilisation d’un panneau solaire.
Dans un premier temps nous allons dévelloper notre tracker solaire selon un seul axe.
Nous commençons par étudier le matériel requis :
- Servo Moteur
- Carte Arduino
- Cellules photosensible
C’est ce que nous aurons besoin au minimum. Il nous faut donc bien connaître ce matériel.
Docs :
ServoMoteur
Caractéristiques techniques
:
- Type : TowerPro SG90
- Dimensions : 22 x 11,5 x 27 mm
- Poids : 9g
- Vitesse: 0.12 sec/60° sous 4.8V
- Couple: 1.2Kg/cm sous 4.8V
- Tension: 4.8V - 6V
- Prise type Graupner UNI
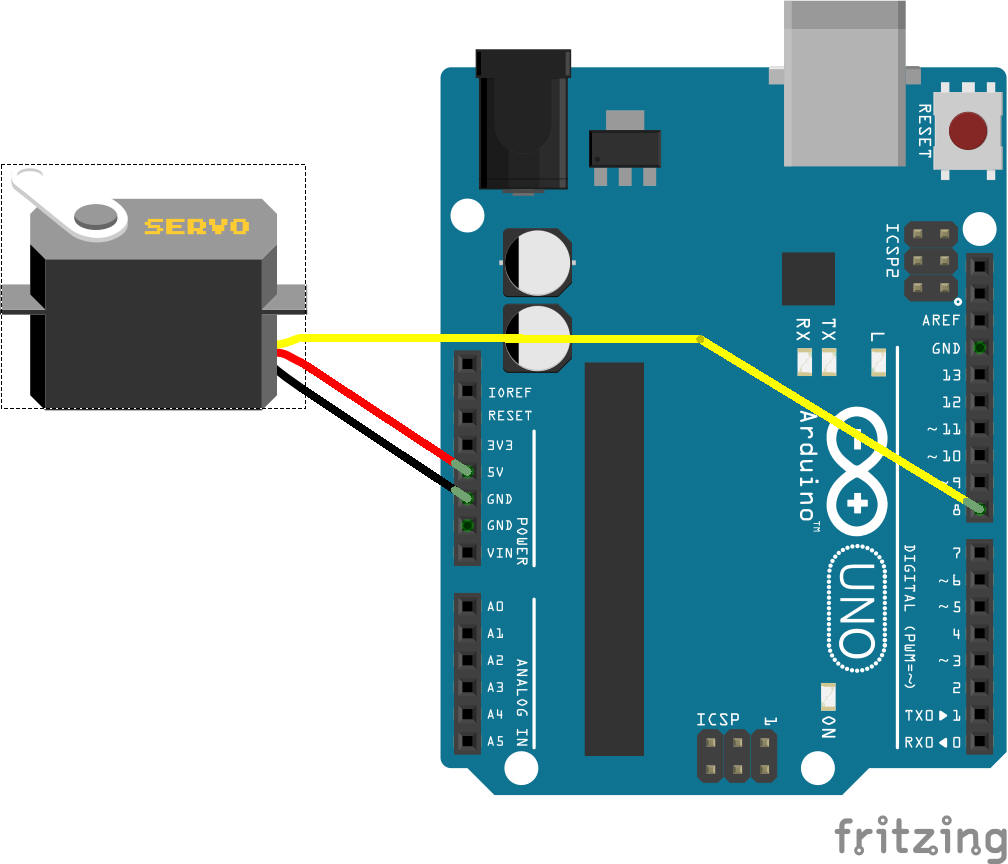
Nous commencerons par étudier le pilotage des servomoteurs :
J'utilise le programme pour piloter deux servomoteur montés l'un dans l'autre avec une application app-inventor sur mon téléphone. Ce programme récupère les informations gyroscopiques fournies par mon téléphone, pour les envoyer par Bluetooth une fois converties. Ce test effectué m'a permis d'observer le montage à effectuer pour le servomoteur ainsi que pour le Bluetooth.
Nous étudions ensuite les photo-diodes BPW34. On observe qu'en pleine lumière d'un flash de smartphone, la tension maximale de sortie est de 4V, ce qui semble être un réglage intéressant pour notre système. (Nous avons prévu de mettre des résistances sur l'Arduino )
Pendant un moment nous avons mis en place notre matériel. Changement d'un des servomoteurs qui ne fonctionnait plus, nous avons soudé les photo-diodes sur un petit circuit imprimé :
![]()
Montage 2x photo-résistances
Désormais nous allons créer le programme Arduino nécessaire au pilotage des moteurs en foction de la luminosité.
Grâce à notre programme Arduino, les Photo-résistances nous permettent de faire tourner la plate forme qui les accueille en fonction de la position de la luminosité la plus forte.
Le programme reste sommaire mais le principe est appliqué :
![]()
![]()