





Mise en œuvre d’un capteur à ultrason
|
Vous pouvez télécharger le texte du TP ici. Télécharger ce document réponse à rendre à la fin du TP. Avec le fichier excel Annexe 1 : Etalonnage capteur à Ultrason HC-SR04 Objectifs du TP :Présentation du module
HC-SR04 :
Etape 1 :
Mise en œuvre du module HC-SR04, premières mesures
Etape 2 : la fidélité Etape 3 : étalonnage et vérification Etape 4 : afficher la distance sur un écran LCD Etape 5 : le challenge
|
 |

 Contexte
professionnel
Contexte
professionnel
Dans des
secteurs à haute exigence comme l'industrie
nucléaire, la surveillance et
la sûreté des installations reposent impérativement sur des systèmes
de mesure d'une fiabilité irréprochable.
L'utilisation de capteurs de distance, tels que le module à
ultrason HC-SR04
étudié dans ce TP, est courante pour des applications critiques
comme le positionnement ou le contrôle de niveau.
Pour qu'un tel capteur puisse être
intégré dans une chaîne de mesure industrielle, une
qualification métrologique
complète est indispensable.
Cette démarche se déploie selon deux axes majeurs :
-
L'Étalonnage et la Justesse :
Tout d'abord, nous devons caractériser les erreurs systématiques du capteur (erreurs de gain et d'offset)
Ces défauts de justesse doivent être compensés par un étalonnage rigoureux, processus qui consiste à relier la valeur mesurée à la valeur de référence.
L'étalonnage permet d'établir un modèle de correction (d = a dt + b) essentiel pour garantir la validité des données. -
Le Budget d'Incertitude et la Fidélité :
Ensuite, nous devons quantifier les incertitudes de mesure.
Les erreurs aléatoires (défaut de fidélité), quantifiées par l'écart-type σ, sont traitées par l'évaluation de type A.
Notre objectif est d'établir le budget d'incertitude complet en propageant toutes les sources (répétabilité, étalon, modélisation).
Le résultat final, l'incertitude élargie U pour un niveau de confiance de 95%, est le garant de la qualité et de la conformité réglementaire de la mesure.
Ce Travail Pratique vous place donc dans la peau de l'ingénieur métrologue chargé de qualifier le capteur à ultrason, en appliquant les principes fondamentaux de l'étalonnage et de la maîtrise des incertitudes.
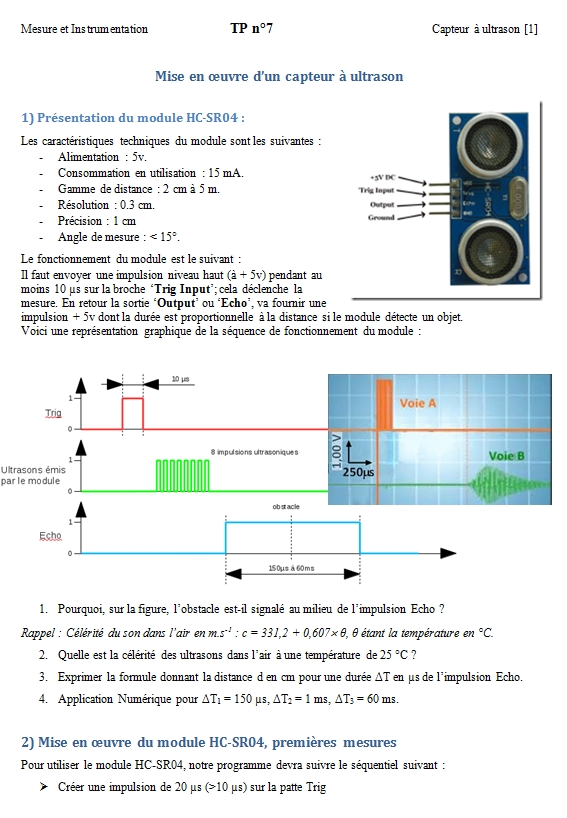
Présentation du module HC-SR04 :
Les caractéristiques techniques du module sont
les suivantes :
-
Alimentation : 5v.
-
Consommation en utilisation : 15 mA.
-
Gamme de distance : 2 cm à 5 m.
-
Résolution : 0.3 cm.
-
Précision : 1 cm
-
Angle de mesure : < 15°.
Le fonctionnement du module est le suivant :
Il faut envoyer une impulsion niveau haut (à + 5v) pendant au
moins 10 µs sur la broche ‘Trig
Input’; cela déclenche la mesure. En retour la
sortie ‘Output’
ou ‘Echo’, va fournir une impulsion + 5v dont la
durée est proportionnelle à la distance si le module détecte un
objet.
Voici une représentation graphique de la séquence de
fonctionnement du module :

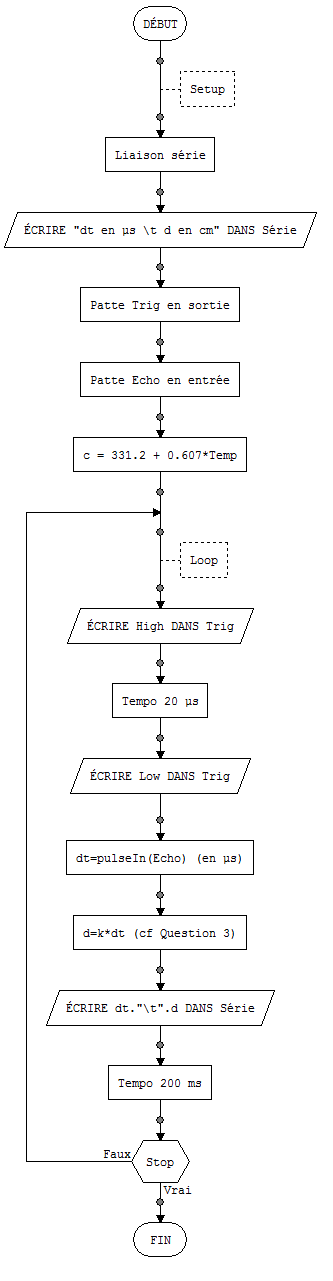 1.
Pourquoi, sur la figure, l’obstacle est-il signalé au milieu de
l’impulsion Echo ?
1.
Pourquoi, sur la figure, l’obstacle est-il signalé au milieu de
l’impulsion Echo ?
Rappel :
Célérité du son dans l’air en m.s-1 : c = 331,2 +
0,607.θ, θ étant la température en °C.
2.
Quelle est la célérité des ultrasons
dans l’air à une température de 25 °C ?
3.
Exprimer la formule donnant la
distance d en cm pour une durée ΔT en µs de l’impulsion Echo.
4.
Application Numérique pour ΔT1
= 150 µs, ΔT2 = 1 ms, ΔT3 = 60 ms.
2) Mise en œuvre du module HC-SR04, premières
mesures
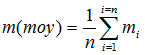
Pour utiliser le module HC-SR04, notre
programme devra suivre le séquentiel suivant :
- Créer une impulsion de 20 µs (>10 µs) sur la patte Trig
- Mesurer la durée ΔT de l’impulsion Echo en µs
- Calculer la distance d en cm correspondante
- Afficher sur le moniteur série la durée ΔT et la distance d
- Attendre 200 ms avant de réaliser une nouvelle mesure
Fonction à utiliser :
pulseIn(broche, valeur, delai_sortie)
·
broche: le numéro de la broche
sur laquelle vous voulez lire la durée de l'impulsion. (type int)
·
valeur: le type d'impulsion à
"lire" : soit
HIGH (niveau
HAUT) ou
LOW (niveau
BAS). (type int)
·
delai_sortie (optionnel): le
nombre de microsecondes à attendre pour début de l'impulsion. La
valeur par défaut est 1 seconde. (type unsigned long)
Valeur
renvoyée : la durée de l'impulsion (en microsecondes) ou 0 si
aucune impulsion n'a démarrée avant le délai de sortie. (type
unsigned long)
Initialiser liaison série
ÉCRIRE
"dt en µs \t d en cm" DANS
Série //
\t = tabulation
Patte Trig en sortie
Patte Echo en entrée
c = 331.2 + 0.607*Temp
RÉPÉTER
ÉCRIRE
HIGH
DANS Trig
//
Créer une impulsion sur la patte Trig
grâce à
digitalWrite(Trig,HIGH)
Tempo 20 µs
// d'une durée de 20 µs (>10 µs)
ÉCRIRE
LOW
DANS Trig
dt=pulseIn(Echo,HIGH
,200000) (en µs) //
Mesurer la durée ΔT de l’impulsion Echo en µs
d=k*dt
// cf Question 3
ÉCRIRE dt+"\t"+d
DANS Série
// Afficher sur le moniteur série la
durée ΔT en µs et la distance d avec 1 chiffre après la virgule
Tempo 200 ms
//
Attendre 200 ms avant de réaliser une nouvelle mesure
JUSQU'À Stop
5.
Réaliser le programme répondant à ce
cahier des charges, puis le tester.
Vous avez du mal à commencer ?
Arduino pour les nuls : affiche la
structure du programme
avec des commentaires.
Toujours en difficulté ? Le
corrigé.
6.
Visualiser sur l’oscilloscope les
signaux des pattes Trig et Echo.
Placer les curseurs afin de mesurer ΔT durée de
l'impulsion Echo.
Joindre une capture d'écran de votre oscilloscope
à votre compte rendu.
7.
Mesurer la durée des impulsions Trig
et Echo. Comparer ces durées à celles attendues.
Puis visualiser la tension reçue par le récepteur US en
synchronisme avec le signal Echo.



8.
Comparer la mesure d à la distance
mesurée par un réglet. Justifiez si nécessaire la différence de
mesure.
3) Incertitude de répétabilité
 Evaluation
de type A de l'incertitude - La fidélité
Evaluation
de type A de l'incertitude - La fidélité
Evaluation de type A :
c’est le cas où l'opérateur réalise une série de mesures répétées
dans les conditions de répétabilité.
Elle se fonde sur l’application de méthodes statistiques à une série
de valeurs expérimentales répétées.
L’incertitude-type u (σ, sigma ou s) est alors déterminée à partir
du calcul de l’écart-type empirique corrigé sn-1
Condition de répétabilité
:
condition de mesurage dans un ensemble de conditions qui comprennent
la même procédure de mesure,
les mêmes opérateurs, le même système de mesure, les mêmes
conditions de fonctionnement et le même lieu,
ainsi que des mesurages répétés sur le même objet ou des objets
similaires pendant une courte période de temps
Les mesures automatisées gérées par votre programme répondent
parfaitement à ces conditions...
Fidélité :
«Étroitesse de l'accord entre les indications ou les valeurs
mesurées obtenues par des mesurages répétés du même objet ou
d'objets similaires dans des conditions spécifiées » (Vocabulaire
International de Métrologie :
VIM).
Le défaut de fidélité résulte des erreurs
aléatoires.
Le défaut de fidélité sera quantifié par
l’écart type de la série de meure.
u = σn-1 = Sn-1
 Loi
normale : Lorsque les causes
d'incertitudes sont nombreuses, indépendantes, et donnent des
erreurs du même ordre de grandeur,
Loi
normale : Lorsque les causes
d'incertitudes sont nombreuses, indépendantes, et donnent des
erreurs du même ordre de grandeur,
l'histogramme de répartition de la série de mesures tend vers une
courbe de Gauss lorsque le nombre n de mesures tend vers l'infini.

 Incertitude
élargie U : L’incertitude élargie U est donc obtenue en
multipliant l’incertitude-type composée par un facteur k appelé
facteur d’élargissement,
Incertitude
élargie U : L’incertitude élargie U est donc obtenue en
multipliant l’incertitude-type composée par un facteur k appelé
facteur d’élargissement,
qui permet d’obtenir un intervalle correspondant à un niveau de
confiance choisi.
Pour une loi de distribution normale (cas le plus
fréquent), le facteur d’élargissement k est assimilable au
coefficient de Student t.
t est disponible dans la table de Student : il varie selon le nombre
de mesures n et le niveau de confiance.
Pour un niveau de confiance de 95 % et un nombre de mesure >50, k
tend vers 2.
9.
- Réaliser une série de 50 mesures
dans les conditions de répétabilité.
- Arrêter le défilement
automatique, sélectionner les 50 premières mesures et les copier ;
coller les mesures
dans un tableau Excel.
-
![]()
10. Calculer dans Excel l’écart-type et la moyenne de cette série de mesure.
 11.
A l’aide de la table de Student
déterminer l’incertitude élargie, pour un intervalle de confiance de
95 %, correspondante à cette erreur aléatoire.
11.
A l’aide de la table de Student
déterminer l’incertitude élargie, pour un intervalle de confiance de
95 %, correspondante à cette erreur aléatoire.
Pour réduire cette erreur aléatoire nous allons
réaliser une série de 4 mesures et afficher sa valeur moyenne.
Si une de ces mesures vaut 0 (écho non reçu) afficher 0 comme
résultat.
12. Modifier le programme pour que celui-ci affiche la valeur moyenne d'une série de 4 mesures
Le filtre moyenneur permet principalement de corriger :
A. Les erreurs aléatoires (défaut de fidélité)
B. Les erreurs systématiques (défaut de justesse)
C. Les deux (fidélité et justesse)
D. Aucune erreur, seulement l’exactitude
somme = 0
// format : non signé (unsigned)
32 bits (long)
soit Nmax = 232 - 1 = 4,29.109
// Attention au format : si une
somme d'entier (int
16 bits) dépasse 32767
le résultat (en
int)
devient négatif...
POUR i = 0
JUSQU'À 3 FAIRE
{
t0 = millis()
// top départ
ÉCRIRE
HIGH
DANS Trig
Tempo 20 µs
ÉCRIRE
LOW
DANS Trig
dt=pulseIn(Echo,HIGH
,200000) (en µs)
somme = somme+dt
//
faire la somme des 4 mesures
SI (dt==0)
ALORS { // renvoi 0 si une
mesure est hors limite.
somme=0
break
// Sortir de la boucle
POUR
si une mesure est hors limite
}
FINSI
TANT
QUE (millis()-t0<200) FAIRE
rien // 200 ms entre 2
mesures
}
FINPOUR
dt=somme/4
// somme/4 = la moyenne...
d=k*dt
// cf Question 3
ÉCRIRE dt+"\t"+d
DANS Série
// Afficher sur le moniteur série la
durée ΔT en µs et la distance d avec 1 chiffre après la virgule
 Mesure
répétée par l’opérateur (répétabilité opérateur)
Mesure
répétée par l’opérateur (répétabilité opérateur)
-
L’opérateur place l’obstacle à 25 cm.
-
Il réalise 10 mesures indépendantes, en repositionnant l’obstacle à chaque fois.
-
On obtient ainsi une série de 10 valeurs reflétant la variabilité liée à la manipulation.
Traitement statistique
-
Calculer l’écart-type expérimental de la série de 10 mesures.
-
Déterminer le coefficient de Student correspondant à n = 10 (donc 9 ddl).
-
En déduire l’incertitude élargie due à la répétabilité opérateur : Uop
Synthèse globale de la fidélité
-
L’incertitude totale liée à la fidélité est obtenue par somme quadratique des deux contributions :

 4) Etalonnage
et vérification du capteur
4) Etalonnage
et vérification du capteur
4) Etalonnage
et vérification du capteurDans le cadre d’un projet de
contrôle de niveau
réalisé pour l’entreprise
AquaBox Manufacturing,

le capteur ultrason HC-SR04
est utilisé pour mesurer la hauteur d’eau dans des réservoirs de
petite capacité.
Le capteur est installé
au-dessus de la cuve et mesure la
distance entre la surface du
liquide et le capteur,
dans une gamme d’utilisation
allant de 5 à 50 cm.
Le client impose une
exigence d’exactitude de ±1 cm afin de garantir la
précision du suivi du niveau.
Pour vérifier que le capteur
répond à cette exigence, nous commencerons par comparer ses
indications au modèle
théorique,
basé sur la vitesse du son et la relation entre le temps de vol (ToF
: Time of Flight) et la distance.
Cette première étape permettra d’évaluer si le capteur est conforme
sans aucune correction supplémentaire.
Si les résultats montrent que le modèle théorique ne permet pas de respecter l’EMT, nous établirons alors un modèle corrigé, incluant :
-
un gain (correction d’échelle),
-
un offset (correction de biais).
Cette équation affine constituera le modèle de correction du capteur, permettant d’améliorer la justesse de la mesure et, si nécessaire, de satisfaire l’exigence du client.
Cet étalonnage, réalisé dans notre laboratoire à l’aide d’un banc de positionnement, fournira le procès-verbal d’étalonnage (PV) qui sera transmis au service qualité pour validation.
Vous allez donc procéder à
l’étalonnage du capteur HC-SR04, en suivant les différentes étapes
proposées.
Au fur et à mesure des questions, vous compléterez le
fichier Excel
servant de procès-verbal
d’étalonnage (PV).

 Etude de l'erreur de mesure due à la fonction pulseIn() :
Etude de l'erreur de mesure due à la fonction pulseIn() :
Tracer dtOscilloscope(dtArduino)
et l'erreur
En théorie dtArduino
= dtOscilloscope. Est-ce
le cas ?
Cette erreur est-elle systématique ou
aléatoire ?
Peut-on corriger cette erreur ?
Il s'agit alors d'une erreur de fidélité.
Une erreur de fidélité peut-être atténuée en effectuant une moyenne
sur une série de mesure.
Ici on peut décomposer cette erreur systématique en 2 :
♦ une erreur d'offset (si
b
♦ une erreur de gain (si
a≠1)
Il s'agit alors d'une erreur de justesse qui implique un biais de
mesure.
Un biais de mesure peut-être corrigé par un étalonnage par exemple.
 15.
Modélisation et étalonnage corrigé
15.
Modélisation et étalonnage corrigé
Le modèle théorique ne
reproduit pas exactement les valeurs mesurées.
Compléter la colonne Écart
:

coefficient k : conversion µs → cm (≈ c / 2 / 10000)
k = c / (2 * 10000) avec c ≈ 340 m/s
Le facteur k = c / (2 × 10000) vient du fait que l’onde fait un aller-retour et que l’on veut un résultat en cm.
Tracer le graphe des écarts b(X). Que constatez-vous sur le signe et l’amplitude des écarts ?
Ces écarts sont-ils constants ou proportionnels à la distance ?
Quelle est la nature de l’erreur dominante : offset, gain, ou mixte ?

Tracer x(dtArduino). Etablir l'équation de cette droite.

16. À partir des données du tableau et de DROITEREG, déterminer les coefficients b1 et b0.
Quelle est la signification physique de b1 et b0 ?
En déduire la
vitesse expérimentale du
son :
Comparer à la valeur théorique à 25 °C (≈ 346 m/s).
Commenter la
cohérence du résultat. Quelles pourraient être les causes de l’écart
observé ?
(Température réelle, latence du module, dispersion des mesures,
etc.)
Etude des résidus du modèle corrigé

L’établissement d’un modèle corrigé : x = b1*ΔT + b0 a pour but principal de :
a. Améliorer la fidélité du capteur (réduire la dispersion des mesures).
b. Améliorer la justesse du capteur (corriger les biais systématiques).
c. Améliorer l’exactitude globale (car la justesse s’améliore, la fidélité reste identique).
d. N’a aucun effet notable sur les performances du capteur.
18. Evaluer
l'incertitude élargie (95%) du modèle Umodélisation
Tuto Excel
: la formule matricielle DROITEREG. Ecart type des résidus : u
= Sey = Sn-2
19.
 Evaluer les
sources d'incertitude suivantes :
Evaluer les
sources d'incertitude suivantes :
- Uétalon (la règle)
- Ufidélité
20. Propagation des incertitudes : évaluer
l'incertitude élargie
pour un niveau de confiance de 95 % de votre
étalonnage.
Faire une conclusion.
Pour remplir ce tableau, reprendre les consignes du TP Datalogging
Consigne de conclusion (à compléter en 4 phrases)
Conclusion : L’exactitude de notre capteur est évaluée en comparant l’incertitude élargie de la chaîne de mesure avec l’EMT de 1 cm demandée par le client.
Complétez ci-dessous les quatre éléments suivants pour conclure :1. U = …
Indiquez la valeur numérique de votre incertitude élargie finale.2. Conformité : …
Précisez si le capteur respecte ou non l’EMT de 1 cm (U ≤ EMT ?).3. Exactitude : …
Expliquez en une phrase si l’exactitude globale de la chaîne répond ou non à l’exigence du client.4. Maillon faible de la chaîne : …
Identifiez l’élément qui contribue le plus à l’incertitude (répétabilité, modélisation, lecture, capteur…).Exactitude : capacité intrinsèque de la chaîne de mesure à être proche de la vraie valeur. (justesse + fidélité)
Conformité : décision finale indiquant si l’instrument respecte l’EMT ou la tolérance exigée.
Exactitude = qualité.
Conformité = verdict.
L’étalonnage d’un capteur permet principalement de corriger :
A. Les erreurs aléatoires (défaut de fidélité)
B. Les erreurs systématiques (défaut de justesse)
C. Les deux (fidélité et justesse)
D. Aucune erreur, seulement l’exactitude
21. Rechercher dans le
VIM la définition de :
Utiliser la
fonction recherche (Find)
![]()
- la précision en français et
precision en anglais
- la justesse de mesure. Le capteur à
ultrason est-il juste ?
- la fidélité de mesure. Le capteur à
ultrason est-il fidèle ?
- l'exactitude de mesure. Le capteur
à ultrason est-il exact ?
Copier ces définitions dans votre compte rendu.
5) Afficher la distance sur un écran LCD
22.
Afficher sur l’écran LCD la distance d en cm,
ou le texte : « Mesure hors limite »
 6)
Le challenge : compteur de passage
6)
Le challenge : compteur de passage
6)
Le challenge : compteur de passage23. Ecrire un programme permettant de compter le
nombre de passage dans l'allée centrale.
Afficher le nombre de passage sur l'écran LCD.
Allumer le rétroéclairage de l'écran LCD lors
d'un passage et l'éteindre au repos.
Comment ne pas compter plusieurs fois le même
passage ?
Piste : → on crée 2 booléens : passage et passage_ancien
→ Si ( d<100
cm et dt>0) passage=1 sinon passage=0
→ Pour détecter un
nouveau passage il faut que :
passage==1 et passage_ancien==0
Rendre le compte rendu soit :
-
sur feuille
-
fichier word dans le répertoire de la classe 1MMesures : Ultrason_Nom1_Nom2
-
fichier word Etalonnage1_Nom1_Nom2 par email à bts.mesure@free.fr