





Régulation de Température
Objectifs du TP :
Réaliser l’étude complète d’un système de régulation de température par CTN et action TOR :
- Étape 1 : Mise en œuvre d’une CTN et
modélisation.
A rendre Annexe 1 : TP_10_CTN_excel.xlsx complété - Étape 2 : Simulation du diviseur et incertitudes de mesure.
- Étape 3 : Réalisation du programme Thermomètre CTN.
- Étape 4 : Régulation TOR à deux seuils
- Etape 5 : Analyse des courbes et amélioration du programme
Compte rendu à rendre
Consigne :
Téléchargez le document réponse et complétez-le tout au long du TP.
Le compte rendu doit être remis à la fin du TP.
Résultats à reporter :
Les résultats des parties 1 et 2 doivent être saisis dans le fichier Excel TP_10_CTN_excel.xlsx
Les tableaux correspondants sont déjà préparés.
Annexes à joindre au compte rendu :
-
Annexe 1 – TP_10_CTN_excel.xlsx (complétée étape 1 et 2)
-
Annexe 2 : capture de l'écran du traceur série sur 500s + annotations (étape 5)
Contexte professionnel
L'automatisation et l'efficacité des
systèmes industriels reposent largement sur la
maîtrise des grandeurs physiques,
au premier rang desquelles figure la température.
Le capteur le plus couramment utilisé dans ce contexte, pour son
rapport coût/performance, est la
Thermistance à Coefficient de Température
Négatif (CTN).
L'étude d'un système de régulation
complet par CTN
s'articule autour de deux problématiques professionnelles majeures :
la justesse de la mesure et l'efficacité du pilotage.
Partie 1 : Modélisation non linéaire et évaluation des incertitudes (Étapes 1 à 3)
La caractéristique intrinsèque de la CTN
est sa
non-linéarité prononcée,
impliquant une relation exponentielle entre résistance et
température.
Afin de garantir une lecture précise sur la gamme d'utilisation,
l'Étape
1 nécessite la mise en œuvre
d'un
modèle non linéaire
(par exemple, un polynôme du 3e ordre
T(V) )pour la conversion.
Cependant, ce choix introduit une
complexité significative dans l'Étape
2 (Simulation et
incertitudes).
Le bilan d'incertitude ne peut plus s'appuyer sur de simples
dérivées
et doit intégrer l'incertitude liée au capteur (UCTN),
à la modélisation (Umod3),
et à la conversion (via la sensibilité minimale
Smin).
La difficulté
à qualifier ce budget d'incertitude dans l'Étape
3 (Réalisation du programme
Thermomètre)
représente un obstacle professionnel majeur pour la qualification
métrologique de la chaîne de mesure.
Partie 2 : Régulation de température TOR à deux seuils (Étapes 4 et 5)
Une fois la mesure validée, la commande la plus simple est la régulation Tout Ou Rien (TOR) à deux seuils (Étape 4).
L'introduction d'une
hystérésis
entre la consigne haute (Ch)
et la consigne basse (Cb)
vise à limiter la fréquence de commutation de l'actionneur et ainsi
prévenir son usure prématurée.
L'Étape 5 (Analyse des courbes) est dédiée à la validation des performances.
L'analyse critique du
régime établi
se concentre sur les critères de
stabilité
(l'amplitude des oscillations
DeltaT
doit rester dans un "tunnel de stabilité"
5%
autour de la consigne moyenne
W)
et
de
précision
(l'écart moyen par rapport à
W.
Ces analyses permettent de conclure sur le compromis entre la simplicité du TOR et les exigences de performance du procédé industriel.
Étape 1 – Mise en œuvre et modélisation de la CTN :
Les thermistances, comme les capteurs de température à résistance
(RTD), sont des semi-conducteurs thermosensibles dont la résistance
varie avec la température.
Les thermistances sont constituées d’un matériau semi-conducteur
d’oxyde métallique encapsulé dans une petite bille d’époxy ou de
verre.
En outre, les thermistances présentent généralement des valeurs de
résistance nominale plus élevées que les RTD (de 2 000 à 10 000 Ω)
et peuvent être utilisées pour de plus faibles courants...
Les thermistances ont une sensibilité de mesure très élevée, ce qui
les rend très sensibles aux variations de températures.
Les thermistances coûtent beaucoup
moins cher qu'une PT100 (RTD), et il suffit d'un simple diviseur de
tension pour les mettre en oeuvre.
Elles sont très utilisées dans l'industrie et les thermomètres grand
public.
La thermistance étudiée possède un Coefficient de Température Négatif (CTN), c’est à dire que la résistance diminue quand la température augmente.
La loi de variation de la résistance d’une CTN en fonction de la
température est donnée par la formule :
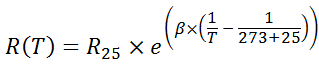
-
 avec :
R25 valeur de la résistance
à T = 273+25 = 298 K (attention dans cette formule il faut
exprimer T en K ! )
avec :
R25 valeur de la résistance
à T = 273+25 = 298 K (attention dans cette formule il faut
exprimer T en K ! ) -
 : indice de sensibilité thermique en K (beta)
: indice de sensibilité thermique en K (beta) - R(T) est la résistance (en ohms) du capteur à la température T cherchée (en Kelvins);
Nous disposons de cette CTN :
- Measurement range: -20 to 105 °C
- Length of wire: 1 meter
- Type: NTC 10 kΩ ±1% 3950
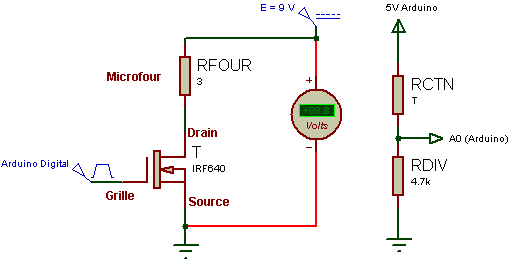
Nous allons l'utiliser dans un pont diviseur :
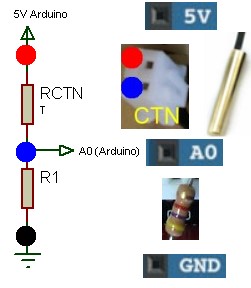
![]()

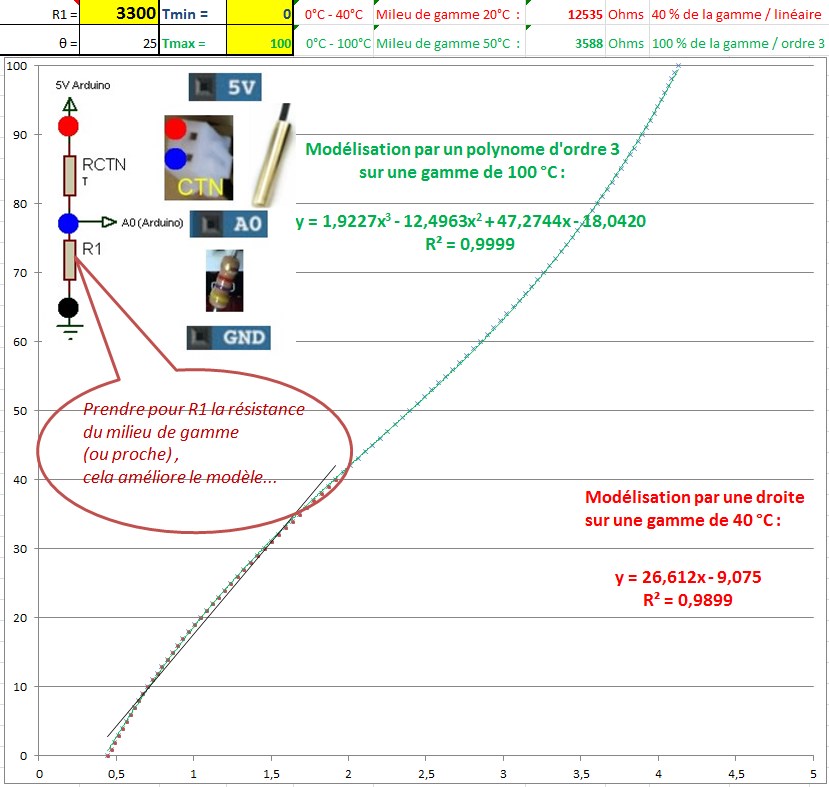 Pour
optimiser ce type de montage, il faut choisir R1 pour qu'il soit
proche de R(t) au milieu de gamme.
Pour
optimiser ce type de montage, il faut choisir R1 pour qu'il soit
proche de R(t) au milieu de gamme.
Lors du projet ballon sonde BBR8, nous avons
construit
TP_10_CTN_excel.xlsx pour
modéliser la CTN.
Puis nous avons réalisé un étalonnage de la CTN,
nous avons constaté que nos températures calculées par Excel
et celles mesurées étaient très proches.
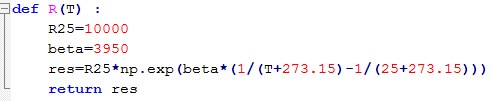
Ou pourquoi pas utiliser un programme python ou un programme Labview que nous développerons plus tard :
Dans ce TP nous allons supposer que les valeurs (T,V) calculées
dans le tableau excel proviennent d'un étalonnage.
Le calcul d'incertitude demandé n'est valable qu'avec un étalonnage.
L'objectif du tableur est de faire une simulation numérique pour
mieux appréhender les différents facteurs.
1.1 -Téléchargement
du tableur :
Téléchargez le tableau
Excel “TTP_10_CTN_excel.xlsx”
à compléter.
Pour vous aider à le remplir
correctement, répondez aux questions suivantes.
1.2 -
Valeur au milieu de gamme :
Quelle est la valeur de la résistance
de la CTN au milieu de la
gamme 20–80 °C ?
1.3 -
Choix de la résistance série :
Quelle valeur de résistance
disponible en J101 choisir pour que le pont diviseur soit optimisé ?
→ Mesurez précisément cette
résistance à l’ohmmètre (4 chiffres significatifs).
1.4 - Tension de sortie du diviseur (colonne V, en volts)
-
Rappelez la formule donnant la tension de sortie V du pont diviseur
-
Interprétation physique (signe positif) :
-
La CTN a un coefficient de température négatif : quand la température augmente, RCTN diminue.
-
D’après la formule ci-dessus, si RCTN diminue alors R1/(R1+RCTN) augmente,
donc la tension mesurée V augmente.
Ainsi, le montage transforme la variation négative de résistance en une variation positive de la tension (plus simple à lire et à modéliser).
-
-
Expliquez pourquoi il est préférable que soit du même ordre de grandeur que dans la gamme étudiée.
1.5 -
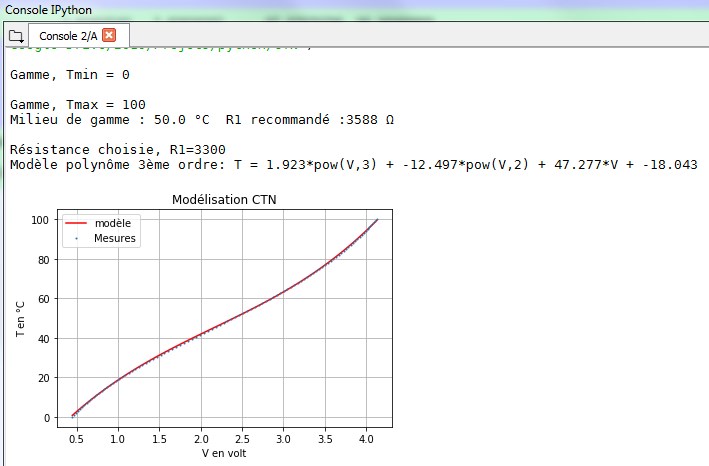
Modélisation :
À l’aide du tableur
Excel, déterminez :
l’équation du
modèle inverse T(V) du 3ᵉ
ordre
1.6 - Incertitudes de modélisation
:
Calculez :l’incertitude
élargie (k = 2) Umod3 du modèle du 3ᵉ ordre.
1.6 - Incertitude du capteur :
La CTN a une incertitude
intrinsèque donnée par : UCTN=0,01×|T−25|+0,25
Interprétez cette formule : que
représentent les deux termes et comment évolue l’incertitude selon
la température ?
 incertitude Umod3
:
calculer l'erreur type de prédiction du modèle.
incertitude Umod3
:
calculer l'erreur type de prédiction du modèle.
Il y a toujours un polynôme d'ordre :
→
1 (T=a1*V+a0)
qui passe par 2 pts (c'est une droite) => n-2
degrés de liberté =>
Sey = Sn-2
= écart-type des résidus pour un ordre
1
→ 2
(T=a2*V2+a1*V+a0) qui
passe par 3 pts => n-3 degrés de
liberté =>
Sey = Sn-3
= écart-type des résidus pour un ordre
2
→ 3
(T=a3*V3+a2*V2+a1*V+a0)
qui passe par 4 pts => n-4 degrés
de liberté =>
Sey = Sn-4
= écart-type des résidus pour un ordre
3
Puis appliquer le facteur d'élargissement 2 (coefficient de
student)
 Pour un échantillion de 101 variables aléatoires on peut confondre Sn-1
et Sn-4= 1,015*Sn-1
Pour un échantillion de 101 variables aléatoires on peut confondre Sn-1
et Sn-4= 1,015*Sn-1
On supposera que l'incertitude (à 5 %) UCTN
de notre capteur est de 1% de la mesure
±
0,25°C avec une référence à 25°C
soit UCTN =0,01*abs(t-25)+0,25
L'utilisation d'un modèle d'ordre 3 permet d'obtenir un coefficient de corrélation très proche de 1.
 Détails
des formules utilisées dans Excel pour l'ordre 3
Détails
des formules utilisées dans Excel pour l'ordre 3

Étape 2 – Simulation et propagation des incertitudes
2.1 -
Quelle formule Excel permet de
calculer la sensibilité
locale en mV/°C entre deux points de température
consécutifs ?
(Astuce : utilisez les cellules
voisines des colonnes V et T.)
→ Quelle est
la formule Excel qui applique le modèle polynomiale du 3ᵉ ordre
obtenu à la question précédente ?
(Exprimez T en fonction de V.)
→ Quelle
formule Excel permet de calculer l’écart entre la température
mesurée et la température calculée par le modèle ?
(Résidu = Tmesurée – Tmodèle)
 2.4 -
Incertitude Arduino :
2.4 -
Incertitude Arduino :
Comment transformer l'incertitude
±
4 LSB en °C ?
Expliquez pourquoi on utilise la
sensibilité locale
plutôt que la sensibilité moyenne du capteur
pour estimer l’incertitude de
conversion.
Pourquoi utiliser Smin
?
Calculez ensuite l’incertitude de
mesure
en °C.
Pourquoi préfère-t-on des
modèles linéaires pour établir un bilan d'incertitude ?
À l’aide du tableur, remplissez le tableau
des incertitudes (déjà préparé dans Excel) pour la gamme 20–80 °C.


-
-
- calculer l'incertitude de la CTN pour cette température
- tenir compte de la sensibilité locale de cette température

2.6
L'utilisation d'un Arduino
est-elle une grande source d'erreur ?
Quel est le maillon faible de cette
chaîne de mesure ?
 Notre
étude est simplifiée, car l
Notre
étude est simplifiée, car l
Cette estimation de l'incertitude est uniquement indicative.
2.7
les résidus suivent-ils une loi normale ?
Conclure sur l'intérêt d'un polynôme d'ordre 3 pour modéliser une CTN dans un pont diviseur.
2.8 - Influence de la gamme et du choix de la résistance R1
| Gamme | R1 | Incertitude élargie sur la gamme en °C (k=2) |
| 20 - 80 °C | 10 kΩ | |
| 20 - 80°C | R1 milieu de gamme = | |
| -20 - 105 °C | 10 kΩ | |
| -20 - 105°C | R1 milieu de gamme = |
Conclure sur le meilleur choix de R1 pour chaque plage et expliquer pourquoi limiter la gamme évite d’augmenter l’incertitude.
Appel 2 : présenter votre tableau Excel et conclure sur le meilleur modèle
Étape 3 : Réalisation du programme Thermomètre CTN.
 3.1
- Réaliser le diviseur de tension avec R1.
3.1
- Réaliser le diviseur de tension avec R1.
Mesurer à l'ohmmètre de précision (4
chiffres significatifs) la valeur de R1 choisie.
(nous n'avons pas estimé
l'incertitude qui découle de ΔR1 : il faut donc la minimiser)
Placer cette valeur dans Excel pour
calculer le modèle ordre 3.
Écrire un programme qui affiche sur
un écran LCD
la température.
Pour améliorer l'incertitude Uarduino (2LSB au lieu de 4 LSB) faites la moyenne de 10 mesures analogRead pour calculer T
Afficher T sur l'écran LCD et sur le traceur série en faisant un Serial.println(T,1)
A coté de la température afficher sur l'écran LCD ΔT : estimation de l'incertitude à 0,1° près

Appel 3 : faites valider votre programme Thermomètre CTN
Étape 4 : Régulation TOR à deux seuils
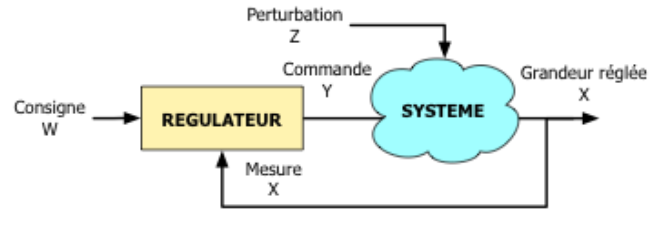
On sépare le fonctionnement d'un régulateur en
deux types d'actions distincts :
- Une action continue avec une sortie du régulateur peut prendre toutes les valeurs comprises entre 0 et 100%.
- Une action discontinue, dans laquelle la sortie Y du régulateur ne prend que deux valeurs. On appelle aussi le fonctionnement discontinu fonctionnement Tout Ou Rien.

 Objectifs
de la régulation :
Objectifs
de la régulation :
- Précision : en régime permanent, la sortie doit suivre la consigne
- Stabilité du système
- Rapidité : Le système asservi doit répondre
le plus rapidement possible aux variations de la consigne
Le système régulé doit répondre le plus rapidement possible à un échelon de la consigne
Vocabulaire de la régulation :
-
X : grandeur réglée (pour nous la température T)
-
Y : Commande (pour nous la commande du hacheur qui pilote le microfour)
-
W : consigne (la température que l'on souhaite obtenir)
-
Z : Perturbation (un courant d'air...)
Comparateur à un seuil (Action discontinue) :
Avantages et Inconvénients d’une régulation TOR à un seuil (figure ci-contre) :
- + Il est rapide.
- - il n'est pas stable. Oscillations de fréquence élevée.
- - il n'est pas très précis. Amplitude des oscillations réduite.


 Comparateur
à deux seuils :
Comparateur
à deux seuils :

 Afin
de diminuer le phénomène de battement à l'approche de la valeur de
consigne, on introduit un deuxième seuil.
Afin
de diminuer le phénomène de battement à l'approche de la valeur de
consigne, on introduit un deuxième seuil.
Cela limite la fréquence de commutation du système pour éviter une
fatigue prématurée des organes de réglages.
- Y : action, Y = 1 le four chauffe, Y = 0 le four ne chauffe pas.
- W1 : Consigne haute (Ch)
- W2 : Consigne basse (Cb)
- La consigne est la moyenne (W)
- La différence (Ch-Cb) est l'hystérésis.
4.1 - Quels sont les avantages et les
inconvénients d'une régulation TOR à 2 seuils ?
Comparer cette régulation à la
régulation TOR à 1 seuil.

Le montage (hacheur) :

4.2 - Écrire un programme pour effectuer une
régulation TOR à 2 seuils.
Déclarer au début du programme int
Cb=48, Ch=52.
4.3 - Afficher sur l'écran LCD : 16 colonnes séparéees en deux (8 + 8)
Ligne 1 :
 T=53.1
T=53.1
 Dt=0.9
Dt=0.9
Ligne 2 :
 Cb=48
Cb=48
 Ch=52
Ch=52
Lorsque le four est alimenté, allumer le rétro-éclairage de l'écran LCD
Lorsque le four est éteint, éteindre le rétro-éclairage de l'écran LCD
consigne = Ch si le four est allumé
consigne = Cb si le four est éteint
Afficher pour le traceur série : T,consigne
![]()
Cadencer le loop() à 1s
Appel 4 : faites valider la régulation TOR à 2 seuils par le professeur
 Etape
5 : Analyse des courbes et amélioration du programme
Etape
5 : Analyse des courbes et amélioration du programme


A rendre : annexe 2 capture de l'écran du Traceur série 500 s + annotations
5.1 - Modifier le programme afin de pouvoir
modifier Ch et Cb à l'aide du moniteur série.
Il suffit d'envoyer un message du
type : Cb=48;Ch=52; ou 48;52;
Si Cb > Ch alors prendre Cb=Ch
(régulation TOR à un seuil).

5.2 - A la mise sous tension, faites une capture du traceur série sur 500 s + annoter les points suivants :
tréponse = temps pour arriver au régime établi (1er cycle de la régulation)
T : la période d'un cycle en régime établi
α : le rapport cyclique α = Ton/T
Tmax et Tmin
5.3 Analyse de la régulation TOR

Consigne haute : Ch=52°C
Consigne basse : Cb=48°C
T0 = 25°C température initiale
Echelon
= Ch-T0 = 52 -25 = 27°C
Critère de rapidité :
Observez le temps nécessaire pour atteindre le régime établi lors
d’un démarrage ou après une perturbation.
→ tr = temps de réponse pour
atteindre le régime établi
→ Le système réagit-il rapidement ?
→ Comparez la rapidité entre la
régulation TOR à 1 seuil
et la régulation
TOR à
2 seuils.
Critère de stabilité :
Premier dépassement : Tmax1
= ______________
dépassement relatif =

Déterminez la consigne moyenne correspondant à la valeur cible autour de laquelle le système oscille.
En prenant un
tunnel de stabilité de ±5 %
autour de cette consigne moyenne,
calculez les limites de la
zone de stabilité
Whaut=W×(1+0,05) ; Wbas=W×(1−0,05)
Comparez les températures observées sur
votre système (entre
et )
avec ce tunnel.
→ Le système reste-t-il
à l’intérieur du tunnel de
stabilité ou en sort-il fréquemment ?
→ Que pouvez-vous en conclure sur la
stabilité de la
régulation ?
Comparez l’amplitude thermique mesurée ΔT=Tmax−Tmin à l’amplitude du tunnel de stabilité (Whaut−Wbas).
→ Si ΔT<(Whaut−Wbas),
le système est stable (température maintenue dans la zone de
tolérance).
→ Si ΔT>(Whaut−Wbas), le système est
instable (température sort du tunnel).
Critère
de précision :
Comparez la température moyenne de fonctionnement avec la consigne.
→ La régulation maintient-elle la
température proche de la consigne ?
→ Le système présente-t-il un écart
moyen significatif ?
Concluez en identifiant les avantages et limites du fonctionnement Tout Ou Rien à 2 seuils par rapport à celui à 1 seuil.
bonus : capture pour une régulation TOR à 1 seuil W=Ch=Cb=50°C + annotation
Appel 5 : faites valider vos mesures

