





Objectif : Mise en œuvre d’un CAN série
Piloter un CAN série intégré avec un protocole de communication SPI. Nous utiliserons le LTC1286 (CAN 12 bits à approximations successives intégré). Notion de métrologie : erreur de gain, erreur d'offset.
Etape 4 : Etalonnage du LTC1286
Le protocole SPI est une des liaisons série les plus
répandues (avec l'I²C et l'UART)
Nous l'avons déjà utilisé pour la mise en œuvre d'une carte
SD à l'aide de la bibliothèque SPI. Compte rendu à rendreConsigne :Téléchargez le document réponse et complétez-le tout au long du TP. Le compte rendu doit être remis à la fin du TP. Résultats à reporter :Les résultats des parties 3 et 4 doivent être saisis dans le fichier Excel TP_08_CAN_Serie_Excel Les tableaux correspondants sont déjà préparés dans les onglets indiqués ci-dessous. Annexes à joindre au compte rendu :
|
 |
 Contexte
professionnel
Contexte
professionnel
Dans le domaine du nucléaire, la
mesure précise des grandeurs
physiques est essentielle pour garantir la
sûreté, la
performance et la
traçabilité des
installations.
Les capteurs de température, de pression ou de rayonnement
fournissent des données indispensables à la surveillance et au
contrôle des procédés.
Les métiers de la
métrologie et de l’instrumentation
nucléaire assurent la
fiabilité de ces
mesures.
Les techniciens vérifient, étalonnent et maintiennent les capteurs
et les systèmes d’acquisition pour garantir des résultats conformes
aux exigences qualité et réglementaires du secteur (ISO 17025, ISO
9001).
Le
convertisseur
analogique-numérique (CAN) est un élément central de ces
systèmes.
Il transforme un signal analogique en une donnée numérique
exploitable par les systèmes de supervision.
Dans certaines installations, des
cartes à CAN série
tel le LTC1286
sont encore utilisées pour la
numérisation des signaux
de capteurs de température.
Ces composants nécessitent un
suivi métrologique
régulier afin de corriger les erreurs de gain et d’offset.
Dans ce contexte, l’étude
technologique pratique (ETP) a pour objectif de
concevoir et réaliser un
banc test d’étalonnage et de vérification des LTC1286.
Ce banc permettra de caractériser le composant, de déterminer ses
erreurs systématiques et de calculer les
équations de correction
nécessaires à l’obtention de mesures fiables.
Ce travail s’inscrit
directement dans les missions d’un
technicien en
instrumentation nucléaire ou d’un
métrologue en centrale,
chargés d’assurer la
traçabilité métrologique des instruments utilisés sur site.
Il développe des compétences clés en
étalonnage, analyse
d’incertitude et exploitation de données de mesure,
essentielles pour garantir la
sécurité et la fiabilité
des installations nucléaires.
Voir cette version plus détaillée.
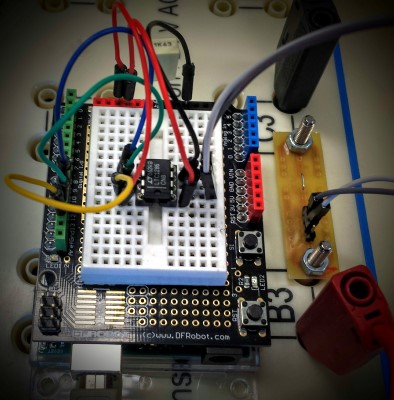
 Etape
1 : Câblage du CAN LTC1286 - Exploitation du datasheet
Etape
1 : Câblage du CAN LTC1286 - Exploitation du datasheet
- VCC = 5V
- L'entrée -IN est mise à la masse.
- La tension d'entrée sur +IN est appelée VIN.
- Mettre un condensateur C = 2.2 µF entre la masse et l'alimentation VCC ainsi qu'entre la masse et VREF.
- Les broches CLK
(SCK <=> D13)
, DOUT
(MISO : Master In Slave Out <=> D12) et CS
(Chip
Select ou Slave Select
<=>D10)
sont reliées aux entrées/sorties digitales 13,12 et 10 du microcontrôleur Arduino.
Questions préliminaires
On appelle N2 le mot binaire de 12 bits renvoyé sur la
sortie DOUT
par le CAN LTC1286.
 1.2)
Déterminer la relation donnant VIN en fonction de N2,
VREF et du nombre de bit du CAN utilisé.
1.2)
Déterminer la relation donnant VIN en fonction de N2,
VREF et du nombre de bit du CAN utilisé.
Mesurer au voltmètre le "5V" de
l'Arduino. Remplacer VREF par cette valeur.
Attention sur la figure q et Vin ont été calculés avec un VREF
< 5 V...
 1.4)
En utilisant le datasheet et en ne prenant en compte que l'erreur de
gain et d'offset :
1.4)
En utilisant le datasheet et en ne prenant en compte que l'erreur de
gain et d'offset :
-
calculer l'erreur type de gain en % de la pleine échelle ;
-
Évaluation de type
B de l'incertitude
mais elle est « estimée » à partir d’informations : certificat
d’étalonnage, classe des instruments, documentation
constructeur…
erreur en V = erreur en LSB * q
L'incertitude max (MAX) correspond à un intervalle de 4σ soit
un niveau de confiance de 99,994 % .
L'incertitude élargie (U) pour un niveau de confiance de 95 %
correspond à un intervalle de 2σ.
L'incertitude élargie se note U (de l’anglais « Uncertainty »)
Le Guide pour l'expression de l'incertitude de mesure (GUM)
constitue le document de référence fondamental de la métrologie
Guide
to the expression of Uncertainty in Measurement


-
Erreur d’Offset → Décalage systématique (biais constant)
-
Erreur de Gain → Mauvaise pente (mauvaise échelle de conversion)
-
Ces erreurs sont systématiques, donc elles s’ajoutent dans l’incertitude totale d’un capteur ou ADC.
Voici un extrait de la documentation constructeur :

Soit une mesure de 005,0087 mVDC (6½
digits) sur
- une erreur de gain en % de la lecture : 0,003%*5,0087
= 0,00015 mV
- une erreur d'offset en % de la gamme : 0,003%*100 = 0,003
mV
Pour une erreur absolue de 0,00315 mV.
V = 5,0087
1.5) Quelle est erreur absolue pour une mesure
![]() faite par le FI2960MT ?
faite par le FI2960MT ?
V = 2,4717 ± ?
Que peut-on dire de cette erreur
devant celle du LTC1286 ?

 Etape
2 : RÉALISATION ET TEST DU PROGRAMME D'ACQUISITION
Etape
2 : RÉALISATION ET TEST DU PROGRAMME D'ACQUISITION
Nous n'utilisons pas la bibliothèque SPI car sa fréquence (4MHz) est trop élevée pour le LTC1286 (200 kHz max).
Voici le protocole à respecter d'après le datasheet :

Pour lire le résultat de la conversion il faut :
- mettre CS à 0 ;
- envoyer 2 impulsions d'horloge ;
- puis pour les 12 impulsions d'horloge suivantes,
après chaque impulsion d'horloge le LTC1286 envoie successivement les bits B11 (MSB) à B0 (LSB);
chaque bit est lu grâce à la fonction digitalRead() : Dout=digitalRead(12);
N2 = B11*211+B10*210+...+B1*21+B0*20 - mettre CS à 1 (fin de la lecture de N2).
Cahier des charges :
2.1) A l'aide des organigrammes ci-contre,
construire un programme permettant de communiquer avec le LTC1286.
La structure du programme comportera :
- un programme principal
- une fonction utilisateur Horloge()
- une fonction utilisateur Acquisition()

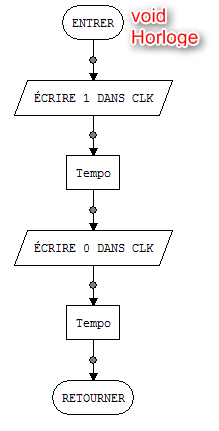
 2.1-a)
Réaliser le sous-programme Horloge et le tester.
2.1-a)
Réaliser le sous-programme Horloge et le tester.
Régler la
temporisation pour avoir une fréquence d’environ 10 kHz à 1 kHz près
(fmax = 200 kHz d’après le datasheet)
Le chronogramme ci-dessous montre que l'état haut de l'horloge dure
55 µs au lieu de 50 µs. Soit 5 µs de trop =>
delayMicroseconds(45);
Le chronogramme ci-dessous montre que l'état bas de l'horloge dure
60 µs au lieu de 50 µs. Soit 10 µs de trop =>
delayMicroseconds(40);
2.1-b) Réaliser le sous-programme Acquisition et le tester en lançant une acquisition.
2.1-c) Finir par le programme principal LTC1286,
lequel lance des acquisitions en boucle toutes les 500 ms
et affiche sur le
moniteur série : "12 2047 2.427"
soit k Tab-> N Tab-> Vin
k numéro de la mesure
tabulation (« \t ») N tabulation (« \t ») Vin (avec 3 chiffres après
la virgule et retour à la ligne).
Dans le setup ajouter : Serial.println("Mesure
\tN \tVin en V");
2.2) Pour une valeur VIN de 2,5 V
contrôlée au multimètre de table,
relever avec l'analyseur logique les
signaux CS, CLK et DOUT montrant le cycle complet de
l'acquisition d'un mot binaire N2.
Retrouver à partir de ces chronogrammes, la
valeur du mot binaire N2 reçu.
Mesurer le temps nécessaire à réaliser un
cycle acquisition.
Joindre au compte rendu une capture d'écran
des chronogrammes

Evaluation de type A de l'incertitude - Fidélité et justesse.
Evaluation de type A :
c’est le cas où l'opérateur réalise une série de mesures répétées
dans les conditions de répétabilité.
Elle se fonde sur l’application de méthodes statistiques à une série
de valeurs expérimentales répétées.
L’incertitude-type u (ou s) est alors déterminée à partir du calcul
de l’écart-type empirique corrigé sn-1
Condition de répétabilité
: condition de mesurage dans un ensemble de conditions qui
comprennent la même procédure de mesure,
les mêmes opérateurs, le même système de mesure, les mêmes
conditions de fonctionnement et le même lieu,
ainsi que des mesurages répétés sur le même objet ou des objets
similaires pendant une courte période de temps
Fidélité :
«Étroitesse de l'accord entre les indications ou les valeurs
mesurées obtenues par des mesurages répétés du même objet ou
d'objets similaires dans des conditions spécifiées » (VIM).
Le défaut de fidélité résulte des erreurs
aléatoires.
Le défaut de fidélité sera quantifié par
l’écart type de la série de meure.
u = Sn-1
Justesse de mesure :
«Étroitesse de
l'accord entre
la moyenne
d'un nombre
infini de
valeurs mesurées
répétées et
une valeur
de référence » (VIM).
biais de mesure (erreur de justesse) :
![]()
 Le
voltmètre FI2960MT nous donne la mesure de référence = référence
Le
voltmètre FI2960MT nous donne la mesure de référence = référence
Le biais de mesure est une erreur systématique qui peut être corrigée par un étalonnage par exemple.
l'histogramme de répartition de la série de mesures tend vers une
courbe de Gauss lorsque le nombre n de mesures tend vers l'infini.

 Incertitude
élargie U : L’incertitude élargie U est donc obtenue en
multipliant l’incertitude-type composée par un facteur k
Incertitude
élargie U : L’incertitude élargie U est donc obtenue en
multipliant l’incertitude-type composée par un facteur k
appelé facteur d’élargissement, qui permet d’obtenir un intervalle
correspondant à un niveau de confiance choisi.
Pour une loi de distribution normale (cas le plus
fréquent), le facteur d’élargissement k est assimilable au
coefficient de Student t.
t est disponible dans la table de Student : il varie selon le nombre
de mesures n et le niveau de confiance.

Etape 3 : Evaluation de type A de l'incertitude du LTC1286 pour un étalon proche de 2,5 V
Les résultats sont à reporté dans l'onglet « Fidélité » du fichier Excel TP_08_CAN_Serie_Excel (tableau déjà préparé).
3.1)  - Réaliser une série de 300 mesures dans les conditions de
répétabilité.
- Réaliser une série de 300 mesures dans les conditions de
répétabilité.
- Arrêter le défilement automatique,
sélectionner les 300 premières mesures et les copier ;
coller les mesures dans
TP_08_CAN_Serie_Excel
(onglet Fidélité ) Méthode
1
-
- Calculer dans Excel l’écart-type
et la moyenne de cette série de mesure.


3.2) Tracer l'histogramme de la
distribution des mesures à l'aide d'Excel
Tuto Excel
: la fonction matricielle FREQUENCE(tableau_données,
matrice_intervalles)
Joindre l'annexe 2 à votre compte
rendu.
L'allure de cette distribution suit
plutôt quelle loi ?

3.3) Calculer le biais de mesure
(quantification de l’erreur de justesse)
Exprimer ce biais en V et en LSB.
Le LTC1286 est-il juste ? Comment
peut-on rendre le LTC 1286 plus juste ?
3.4) Calculer l’écart-type ufidelité
de cette série de mesure.
Exprimez ufidelité en volt
et en LSB.
En déduire l'incertitude élargie Ufidélité
pour un intervalle de confiance de 95%
Le LTC1286 est-il fidèle ? Comment
peut-on rendre le LTC 1286 plus fidèle ?

 Etape
4 : Étalonnage et vérification du convertisseur LTC1286
Etape
4 : Étalonnage et vérification du convertisseur LTC1286
PV d'étalonnage à remplir dans l’onglet « Étalonnage » du fichier Excel TP_08_CAN_Serie_Excel (tableau déjà préparé).
Dans un contexte industriel,
comme celui de ThermaControl
Industries,
où d’anciennes cartes d’acquisition pilotent encore des capteurs
analogiques de température,
la fiabilité du convertisseur
LTC1286 reste
essentielle pour garantir la surveillance thermique des équipements.
L’étalonnage est réalisé selon une méthode indirecte :
-
 la
tension continue est générée par un
GBF Agilent,
la
tension continue est générée par un
GBF Agilent,
utilisé comme source car il constitue l’alimentation la plus stable du laboratoire, -
tandis que l’étalon FI2960MT fournit la valeur de référence certifiée.
Le LTC1286 estime la tension via son modèle constructeur .
Nous vérifions d’abord si ce modèle respecte l’EMT client de 5,5 LSB.
Si ce n’est pas le cas (erreur
d’offset ou de gain trop élevée), un
modèle corrigé
est proposé afin d’assurer la conformité des cartes utilisées en
production.

Contexte de l’étalonnage
L’étalonnage d’un convertisseur
analogique-numérique (CAN) consiste à
vérifier la conformité des
valeurs mesurées par rapport à une
valeur de référence connue
et à
caractériser les erreurs systématiques (gain et offset).
Dans cette partie, vous allez établir un procès-verbal d’étalonnage (PV d’étalonnage) pour le CAN série LTC1286,
afin de vérifier sa conformité à la demande client suivante :


4.1 – Moyenne de plusieurs acquisitions
Objectif : Réduire le bruit de mesure (erreur aléatoire).
-
Modifier le programme principal afin qu’il affiche la valeur moyenne de 10 acquisitions successives du LTC1286.
-
Observer la stabilité des valeurs affichées sur le moniteur série.
-
Reporter une série de 300 mesures dans l'onglet Fidélité Méthode 2
Tracer l'histogramme et calculer le Ufidélité Méthode 2 comme à la question 3.2 et 3.4 -
Question : Quelle erreur (aléatoire ou systématique) est réduite par cette méthode de moyennage ?
Consigne : Reporter les observations et la conclusion dans l’onglet « Étalonnage » du fichier Excel TP_08_CAN_Serie_Excel.
4.2 – Tableau d’étalonnage
Objectif : Comparer les valeurs mesurées par le LTC1286 avec les valeurs de référence obtenues à l’aide du voltmètre FI2960MT.

-
Régler la tension d’entrée à différentes valeurs connues (environ 0,5 V – 1 V – 2 V – 3 V – 4 V – 4,5 V – 4,9 V).
-
Mesurer pour chaque valeur :
-
la tension de référence à l’aide du voltmètre FI2960MT,
-
la valeur numérique fournie par le LTC1286,
-
la tension mesurée par le LTC1286 calculée à partir de :

-
-
Calculer pour chaque point :
-
l’erreur en mV,

-
l’erreur en LSB.

-
tracer sur Excel le graphe des écarts Ecart (Vmesuré)
-

-
-
À la lecture du graphique des écarts, l’erreur observée correspond principalement à :

🔘 une erreur d’offset (biais constant, décalage vertical),
🔘 une erreur de gain (proportionnelle à la tension),
🔘 une combinaison d’offset et de gain,
🔘 ou une dispersion aléatoire (erreur de fidélité).
Rédiger une conclusion de 3-4 lignes sur l'analyse graphique des écarts.
Consigne : Reporter toutes les mesures et calculs dans l’onglet « Étalonnage » du fichier Excel TP_08_CAN_Serie_Excel (tableau déjà préparé).
4.3 – Modélisation de l’étalonnage
Objectif : Déterminer la droite d’étalonnage et quantifier les erreurs de gain et d’offset.

-
Tracer dans Excel la courbe .

-
Utiliser la fonction DROITEREG() pour déterminer les coefficients de la droite : Vcorr = b1*N+b0
pour recalculer les tensions corrigées.

-
Reporter les valeurs de et dans le tableau Excel.
-
Calculer et commenter :

-
l’erreur de gain (écart relatif entre et ),
-
l’erreur d’offset en % de la pleine échelle (valeur de ),
-
leur équivalent en LSB (100% -> 4096 LSB)
-
-
Comparer les valeurs obtenues aux tolérances constructeur du LTC1286.
-
Question : En vous appuyant sur les valeurs d’offset, de gain et sur l’incertitude du modèle,
votre LTC1286 est-il conforme à la demande client avant correction ?
Justifiez votre réponse.
Consigne : Reporter tous les résultats numériques, les graphiques et les conclusions dans l’onglet « Étalonnage » du fichier Excel.
4.4 – Vérification après correction
Objectif : Évaluer la justesse après correction à l’aide du modèle d’étalonnage.

-
Utiliser le modèle obtenu précédemment :
-
Compléter à nouveau le tableau d’étalonnage dans Excel (colonnes « après correction »).
-
Comparer les nouvelles erreurs avec celles du tableau initial.
-
Questions :
-
Les erreurs sont-elles réduites ?
-
Le biais de mesure a-t-il disparu ?
-
Quelle est l’incertitude élargie à 95 % (calculée à partir de et du facteur ) ?
-
Consigne : Reporter les valeurs corrigées, les comparaisons et la conclusion dans l’onglet « Étalonnage » du fichier Excel TP_08_CAN_Serie_Excel.
4.5 – Bilan des
incertitudes
Objectif : Compléter et interpréter le tableau des incertitudes du LTC1286.
-
Dans l’onglet « Étalonnage », compléter le tableau récapitulatif des sources d’incertitude en y indiquant :
-
l’incertitude type (u),
-
la loi de probabilité (normale ou rectangulaire),
-
le facteur d’élargissement (k),
-
la variance ,
-
et la contribution relative (%) de chaque source.
-
-
Calculer l’incertitude élargie totale U (pour un niveau de confiance de 95 %).
-
Questions :
-
Quelle source d’incertitude est la plus dominante ?
-
Quelle est la valeur totale de exprimée en volts et en LSB ?
-
Le résultat global est-il conforme à l’EMT (Erreur Maximum Tolérée) du constructeur ?
-
Consigne : Compléter le bilan des incertitudes directement dans l’onglet « Étalonnage » du fichier Excel TP_08_CAN_Serie_Excel puis commenter vos résultats dans la cellule prévue à cet effet.
Erreur de résolution d’un CAN (ou d’un instrument numérique)
 Un
convertisseur analogique–numérique (CAN) code une tension
analogique continue en une valeur numérique
discrète.
Un
convertisseur analogique–numérique (CAN) code une tension
analogique continue en une valeur numérique
discrète.
Chaque valeur numérique correspond à une
plage de tension
: elle ne représente donc pas une valeur exacte, mais un
intervalle de largeur
égale au quantum
.
Chaque code N représente toutes les tensions comprises entre :
Ainsi :
-
le code 2048 représente toutes les tensions entre 2047,5 q et 2048,5 q,
-
le code 2049 démarre à 2048,5 q, etc.
Calcul de l’incertitude type liée à la résolution

Etape 5 : Il vous reste du temps ?
Ajouter au montage un écran LCD qui affiche q, N et la tension mesurée
6) Pour aller plus loin.
Il est possible d'utiliser la bibliothèque SPI pour communiquer avec le LTC1286.
Cela permet de communiquer plus vite.
Pour cela il faut :
-
diminuer la fréquence d'horloge (16/4 = 4 MHz par défaut) en dessous de 200 kHz grâce à la fonction :
SPI.setClockDivider(SPI_CLOCK_DIV128); // Horloge à 16000/128 = 125 kHz -
 lire
l'octet de poids fort et éliminer les 2 bits haute impédance
(HI-Z) et le bit nul
lire
l'octet de poids fort et éliminer les 2 bits haute impédance
(HI-Z) et le bit nul
les 3 bits de poids fort sont à éliminer
(en SPI_MODE0, les bits sont lus sur un front montant d'horloge)
pour cela nous allons faire un décalage à gauche de 3 bits et garder les 5 bits à droite
N1=SPI.transfer(0x00)<<3; -
seuls les 7 bits à gauche sont à garder (5+7 = 12 bits) le dernier bit lu est en haute impédance (HI-Z)
pour cela nous allons faire un décalage à droite de 1 bit et garder les 7 bits à gauche :
-
N1 correspond au 5 bits de poids fort B11 à B7
il faut déplacer le bit de N1 de rang 7 au rang 11 en le multipliant par 24
N2 correspond au 7 bits suivants B6 à B0
Combien de temps faut-il au LTC1286 pour transmettre N ?
Remplacer
SPI_CLOCK_DIV128 par
SPI_CLOCK_DIV64
Quelle est la nouvelle fréquence d'horloge ?
Le LTC1286 fonctionne-t-il encore correctement ?