





Piloter le moteur à l'aide de son codeur
 Cette
fonction utilise le
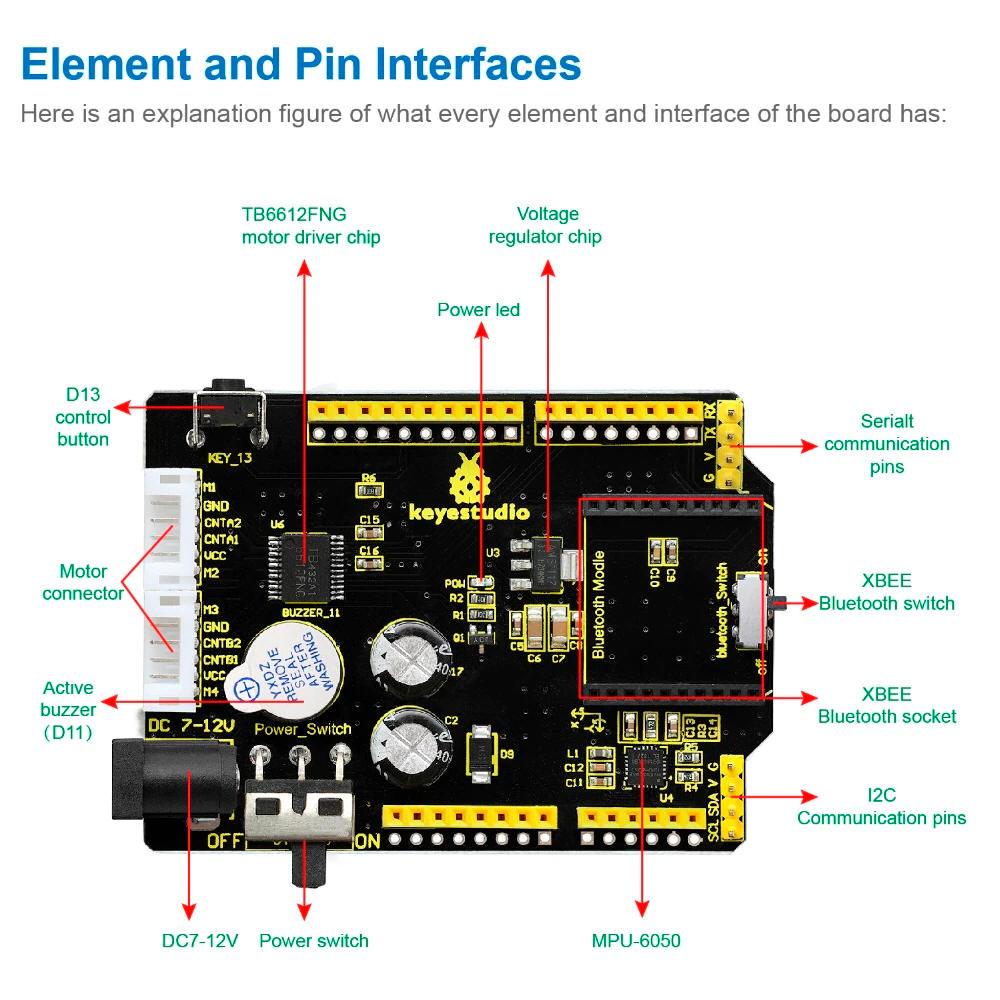
shield Balance Car de Keyestudio.
Cette
fonction utilise le
shield Balance Car de Keyestudio.
Selon le montage du robot il faudra peut-être inverser
les pattes droites (right) et gauches (left) ...
/* Déclaration des constantes et variables
à placer au début du programme
Pour plus de lisibilité placer les fonctions
dans un nouvel onglet fonction.*/
const int Hall_G_A1= 5; // Capteur effet Hall gauche A1 D5
const int Hall_G_A2 = 2; // B pour déterminer de sens de rotation
const int Hall_D_A1 = 4; // Capteur effet Hall droite A1 D4
const int Hall_D_A2 = 3;
//TB6612 pins
const int right_R1=7;
const int right_R2=6;
const int PWM_R=9;
const int left_L1=8;
const int left_L2=12;
const int PWM_L=10;
const int BP=13; // Bouton Poussoir shield V3
const int buz = 11; // set the buzzer pin
unsigned long t0;
long i, iBP, recu;
float dt=0.005;
bool Had,Had0,Hag,Hag0;
int Cd,Cg,Cd0,Cg0;
int consigne,vmax=255;
/* Pour plus de lisibilité placer les fonctions
dans un nouvel onglet fonction.*/
void iniPin(){
// Bouton Poussoir : commute balancing
pinMode(13,INPUT_PULLUP);
//set the control motor’s pin to OUTPUT
pinMode(right_R1,OUTPUT);
pinMode(right_R2,OUTPUT);
pinMode(left_L1,OUTPUT);
pinMode(left_L2,OUTPUT);
pinMode(PWM_R,OUTPUT);
pinMode(PWM_L,OUTPUT);
pinMode(buz,OUTPUT);
pinMode(Hall_G_A1,INPUT);
pinMode(Hall_G_A2,INPUT);
pinMode(Hall_D_A1,INPUT);
pinMode(Hall_D_A2,INPUT);
//Initial state value
digitalWrite(right_R1,1);
digitalWrite(right_R2,0);
digitalWrite(left_L1,0);
digitalWrite(left_L2,1);
analogWrite(PWM_R,0);
analogWrite(PWM_L,0);
}
 void moteur(int droite,int gauche) {
droite=-droite;gauche=-gauche; // Selon cablage robot
if (droite> vmax) droite= vmax;
if (droite<-vmax) droite=-vmax;
if (gauche> vmax) gauche= vmax;
if (gauche<-vmax) gauche=-vmax;
// if(angle_gyro>50 || angle_gyro<-50) {
// droite=0;gauche=0;
// balancing=false; }
if(gauche>=0) {
digitalWrite(left_L1,LOW);
digitalWrite(left_L2,HIGH);
analogWrite(PWM_L,gauche);}
else {
digitalWrite(left_L1,HIGH);
digitalWrite(left_L2,LOW);
analogWrite(PWM_L,-gauche);}
if(droite>=0){
digitalWrite(right_R1,LOW);
digitalWrite(right_R2,HIGH);
analogWrite(PWM_R,droite);}
else {
digitalWrite(right_R1,HIGH);
digitalWrite(right_R2,LOW);
analogWrite(PWM_R,-droite);}
}
void raz() { // RAZ à chaque appui du Bouton Poussoir 13
iBP=i;recu=i;
consigne=0;
moteur(0,0);
delay(500);
Cd=0;Cd0=0;Cg=0;Cg0=0;
digitalWrite(buz,HIGH);
}
void moteur(int droite,int gauche) {
droite=-droite;gauche=-gauche; // Selon cablage robot
if (droite> vmax) droite= vmax;
if (droite<-vmax) droite=-vmax;
if (gauche> vmax) gauche= vmax;
if (gauche<-vmax) gauche=-vmax;
// if(angle_gyro>50 || angle_gyro<-50) {
// droite=0;gauche=0;
// balancing=false; }
if(gauche>=0) {
digitalWrite(left_L1,LOW);
digitalWrite(left_L2,HIGH);
analogWrite(PWM_L,gauche);}
else {
digitalWrite(left_L1,HIGH);
digitalWrite(left_L2,LOW);
analogWrite(PWM_L,-gauche);}
if(droite>=0){
digitalWrite(right_R1,LOW);
digitalWrite(right_R2,HIGH);
analogWrite(PWM_R,droite);}
else {
digitalWrite(right_R1,HIGH);
digitalWrite(right_R2,LOW);
analogWrite(PWM_R,-droite);}
}
void raz() { // RAZ à chaque appui du Bouton Poussoir 13
iBP=i;recu=i;
consigne=0;
moteur(0,0);
delay(500);
Cd=0;Cd0=0;Cg=0;Cg0=0;
digitalWrite(buz,HIGH);
}