La régulation Proportionnelle
 Vocabulaire
de la régulation :
Vocabulaire
de la régulation :
-
X : grandeur réglée (pour nous la température T)
-
Y : Commande (pour nous la commande du hacheur qui pilote le microfour)
-
W : consigne (la température que l'on souhaite obtenir)
-
Z : Perturbation (un courant d'air...)
-
Ecart = W-X , écart entre la consigne et la grandeur mesurée.
-
Erreur statique : W-Xfinal
l'erreur statique caractérise la précision du système. -
 Echelon
: Xfinal-Xinitial
Echelon
: Xfinal-Xinitial
On applique une variation brusque de la consigne (entrée du système)
et on observe l'évolution de X.
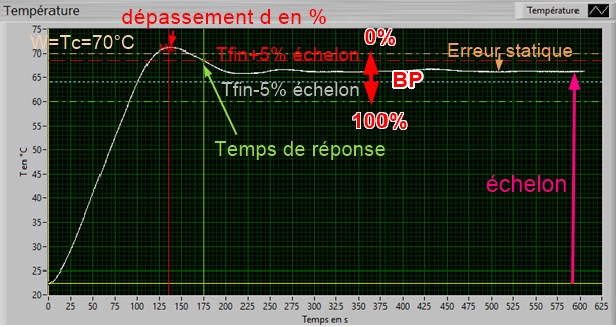
Par exemple passer de la température ambiante à W=Tc=70°C
qui entraîne une variation de Xinitial =Tamb=22,4°C (0%) à Xfinal=Tfin=66,4°C (100%)
cet échelon = 66,4-22,4 = 44°C sert de référence pour exprimer en % les autres grandeurs.
L'observation de la grandeur réglée (évolution de T ou X) permet d'identifier le système
cf les transformées de Laplace. -
Temps de réponse : le temps de réponse est le temps nécessaire pour que le régime transitoire ait totalement disparu.
Toutefois en pratique, on convient, en fonction de la précision exigée que c’est le temps au bout duquel
la réponse du système pénètre dans le couloir Tfin ± 5%.échelon sans en sortir.
Le temps de réponse caractérise la rapidité du système. -
Dépassement : Le premier dépassement permet de qualifier la stabilité ou la robustesse d'un système.
Plus celui-ci sera important, moins le système sera stable.

-
Pleine échelle : C’est l’étendue des mesures que peut prendre le régulateur.
PE = X(100%)-X(0%)
Ex : Le transmetteur 4 – 20 mA travaille sur la plage de mesure 0°C -100°C, d’où PE = 100 °C
Le régulateur ENDA en mode Pt.0 a pour plage de mesure -99 °C à 300 °C, d’où PE = 400 °C
Le Correcteur P
 Dans
la mesure où Y est compris entre 0% et 100%, la valeur de la
commande Y du régulateur est proportionnelle à l’écart (W-X).
Dans
la mesure où Y est compris entre 0% et 100%, la valeur de la
commande Y du régulateur est proportionnelle à l’écart (W-X).
Pour un régulateur proportionnel, on a :
Y = Gr * (W-X)
Avec Gr gain du régulateur proportionnel. Nous pouvons aussi
l'appeler Kp.
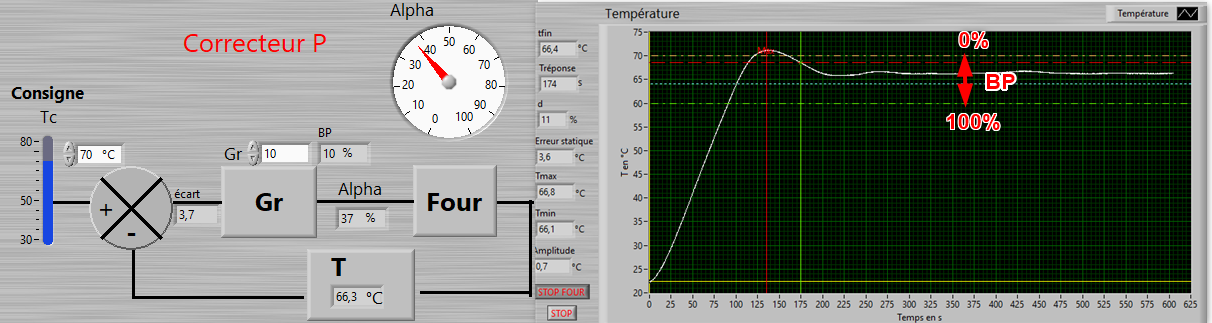
Lors d'une variation en échelon de la consigne, le système à une réponse ressemblant à celle représentée sur la figure ci-contre.
La mesure évolue pour se rapprocher de la consigne, sans jamais
l’atteindre.
Il réside donc toujours une erreur statique.
Pour diminuer le temps de réponse, il faut augmenter Gr.
L'augmentation de Gr fait aussi diminuer l'erreur statique.
Par contre l'augmentation de Gr apporte de l'instabilité.
Une bonne régulation est un compromis entre la précision, la stabilité et la rapidité.
Bande Proportionnelle : (Pb, BP ou Xp)
Si on représente la relation entre la commande Y et l’écart ε,
la bande proportionnelle BP est la partie où la commande est
proportionnelle à l’erreur (ici Y = α = Gr ε).
En dehors de la Bande Proportionnelle, le régulateur fonctionne en
Tout Ou Rien.
 Pb
en % est le paramètre qui remplace Gr lorsque l'on utilise un
correcteur PID de type industriel.
Pb
en % est le paramètre qui remplace Gr lorsque l'on utilise un
correcteur PID de type industriel.
Exemple du ENDA
ETC4420
disponible au labo.
A la limite de la bande proportionnelle nous avons : 100 = Gr × εmax,
donc BP = [ Tconsigne- εmax ;
Tconsigne] :

Exemple : programmer Gr = 10, soit εmax=10°C avec un régulateur ETC4420
 Le
régulateur ENDA en mode Pt.0 a pour plage de mesure -99 °C à
300 °C, d’où PE = 400 °C
Le
régulateur ENDA en mode Pt.0 a pour plage de mesure -99 °C à
300 °C, d’où PE = 400 °C

Gr = 10 => εmax= 10°C ce qui représente 2,5% (10/400) de la plage de mesure...
Le transmetteur 4 - 20 mA
Pour mesurer la température nous allons utiliser une PT100 qui est un standard dans l'industrie.
La boucle de courant 4 -20 mA est aussi un standard dans
l'industrie.
4 mA représente le minimum d'échelle (ici 0°C), et 20 mA représente
le maximum d'échelle (ici 100°C).
Aussi nous trouvons facilement des transmetteurs 4 -20 mA
et des circuits intégrés spécialisés tel que le
XTR105
pour réaliser un transmetteur 4 - 20 mA.
![]() De
plus le XTR105 grâce à sa structure proche d'un pont de Wheatstone
De
plus le XTR105 grâce à sa structure proche d'un pont de Wheatstone
permet de corriger la résistance des fils pour une PT100 à 3 fils.
Le XTR105 implique un générateur de courant de 0,8 mA, ce qui limite
l'auto-échauffement.
Si on considère que 3 mA implique 0,5°C d'auto-échauffement,
0,8 mA n'implique que (0,8/3)2.0,5
= 0,03°C d'auto-échauffement.
ΔT est proportionnel à I2 car P = R.I2
= h.S.ΔT
La sensibilité d'une PT100 traversée par 0,8 mA est de 0,3 mV/°C.
Grâce à l'amplificateur d'instrumentation du XTR105 elle passe dans
ce montage à 80 mV/°C.
Le XTR105 apporte ici une amplification de 260, soit un gain de 48
dB !
Ce gain permet d'utiliser une NI6009 au lieu d'un voltmètre de
précision pour mesurer T.
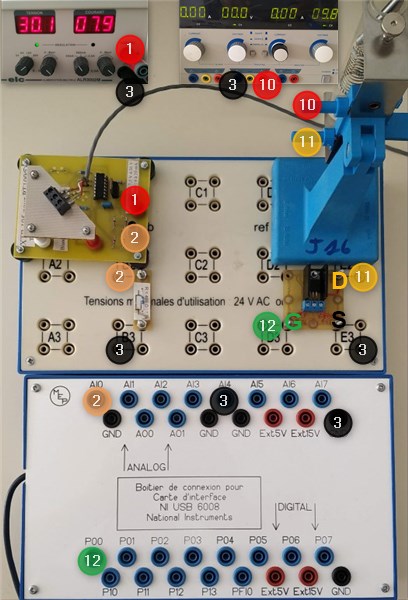
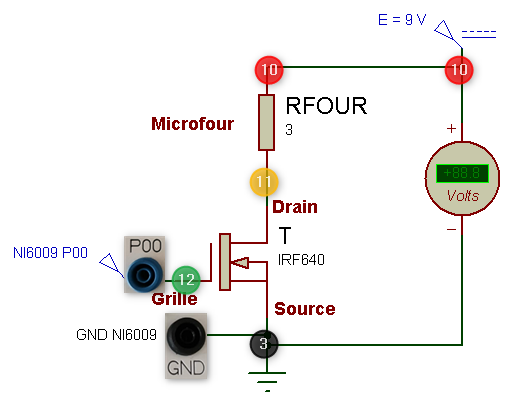
Voici le schéma du branchement à réaliser :
![]()
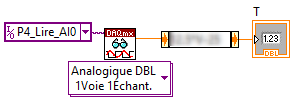
L'acquisition de la tension VR
se fait à l'aide d'une NI6009
et de son entrée analogique AI0 en mode differentiel (AI0
+ et AI4 -)
1. Réaliser le montage et afficher la température acquise par la
PT100.
Faites varier l'alimentation U à 18V, 24V puis 30 V.
Est-ce que I varie ?
Pour la suite prendre U
= 24V (c'est aussi la tension des ventilateurs du labo...)
 La
régulation, le montage :
La
régulation, le montage :
Le montage est le même que celui réalisé lors du TP régulation TOR.
La carte NI6009 ne dispose pas de sortie
PWM permettant de piloter directement le hacheur.
Autre solution : utiliser une carte Arduino et une sortie PWM,
cf cette version du TP.
PWM : Pulse
Width Modulation
en français MLI :
Modulation de
Largeur d'Impulsions
Pour réaliser une PWM par programmation avec une NI6009 nous allons :
-
 Fixer
une période T = 100 ms
Fixer
une période T = 100 ms
petite devant les constantes de temps du process
suffisament grande pour être réalisée par programmation. - de 0 à Alpha ms P00 est à l'état haut (four allumé).
- de Alpha à 100 ms P00 est à l'état bas (four éteint).
- Cette programmation sera dans une boucle indépendante, sans
connexion avec les autres boucles,
ainsi son éxécution pourra se réaliser en parallèle des autres boucles...

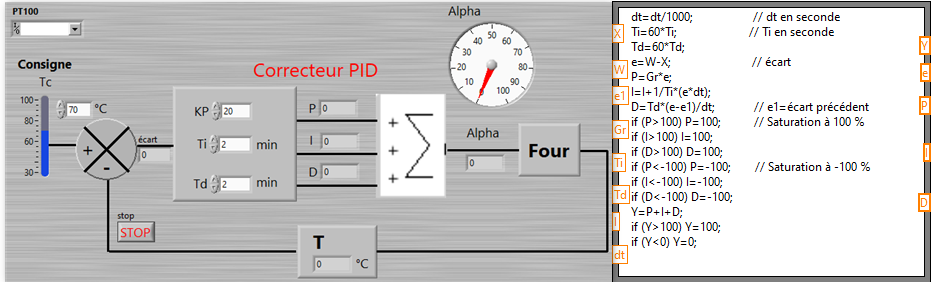
 Programmation
d'une correction P
Programmation
d'une correction P
Vous pouvez télécharger cette face avant pour réaliser votre VI.
2. Réaliser une boucle qui :
-
mesure T,
-
calcule Alpha (ou Y)
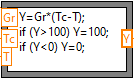
3. Cahier des charges du programme Labview :
-
Utiliser la Face Avant ci contre.
-
Calculer à l'aide de cette température l'action Y à réaliser (Alpha)
la température de consigne TC (W) est une commande du programme,
le gain du régulateur Gr (ou Kp) est aussi une commande du programme. -
Calculer εmax et la bande proportionnelle en % pour le Gr demandé.
-
 Afficher
le graphe T sur une durée de 5 min.
Afficher
le graphe T sur une durée de 5 min. -
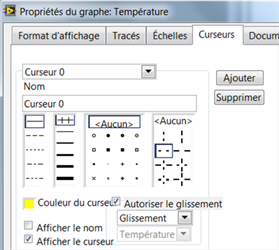
Prévoir 6 curseurs pour le graphe :
0) Tmax (style point sur la courbe)
1) Temps de réponse à 5 % (style point sur la courbe)
2) Tfin+5 % = Tini + 1,05*Echelon (style horizontal, glissement libre)
3) Tfin-5% = Tini + 0,95*Echelon (style horizontal, glissement libre)
4) Curseur sur la courbe à la disposition de l'utilisateur
5) Tc (style horizontal, glissement libre)
6) Tc - εmax pour matérialiser BP (style horizontal, glissement libre)
4. Tester votre programme avec Gr =
10.
Une fois le système stabilisé, relever la
valeur de Alpha = Y0
5. La régulation est-elle stable ? Calculer la valeur du premier dépassement.
6. La régulation est-elle
rapide ? Proposer une méthode pour mesurer le temps de réponse à 5
%.
Calculer l'échelon appliqué.
Calculer la valeur correspondant à
une tolérance de + 5 % de l'échelon. Placer un curseur horizontal à
cette valeur.
Calculer la valeur correspondant à
une tolérance de - 5 % de l'échelon. Placer un autre curseur
horizontal à cette valeur.
Faire une capture de la courbe à
joindre au compte-rendu
7. La régulation est-elle
précise ? Comment augmenter la précision ? Peut-on obtenir une
erreur nulle ?
Reporter les résultats dans le tableau
récapitulatif de la question 9.
Décalage de bande - Talon - Intégrale manuelle
Pour augmenter la précision, on peut ajouter un décalage de bande Y0 :
Y = Gr * (W-X) + Y0
Ce décalage sera par la suite remplacé par une
action intégrale.
Une action intégrale apporte de l'instabilité lors de l'application
d'un échelon ou d'une entrée perturbatrice.
Pour limiter le premier dépassement, baisser Gr à 3 (au lieu de 10).
L'action Dérivée permet aussi de limiter ce premier dépassement dans
un régulateur PID.
8. Réaliser un décalage de
bande (cf paragraphe ci-dessous).
Mesurer alors l'erreur statique,
La valeur du premier dépassement en %
Le temps de réponse à 5 %
Faire une capture de la courbe à
joindre au compte-rendu
9. Reportez ces résultats dans le tableau récapitulatif ci-dessous (à copier dans Excel)
| Comparaison régulation | TOR 2 seuils | P | P + Talon | |
|
Si (four & T > Ch) four = 0 Si (!four & T < Cb) four = 1 |
Y = Kp*( consigne - T ) | Y = Kp*( consigne - T) + Y0 | ||
| Ch = | Kp = | Kp = | ||
| Cb = | Consigne = | Consigne = | ||
| Consigne | ||||
| Echelon | ||||
| Temps de réponse : tR | Rapidité | |||
| Régime établi : | ||||
| Amplitude = Tmax - Tmin | Stabilité | |||
| d en % | Stabilité | |||
| erreur statique = Tmoy - consigne | Précision | |||
| comparaison sur : | ||||
| la rapidité | ||||
| la stabilité | ||||
| la précision | ||||
Vous avez perdu vos résultats du TP TOR 2 seuils ? Prenez les résultats disponibles ici...
Vous avez fini ?
10. Proposer un algorithme afin de
déterminer automatiquement :
- le dépassement d en %
- le temps de réponse tr5%
en s
 Pistes
:
Pistes
:
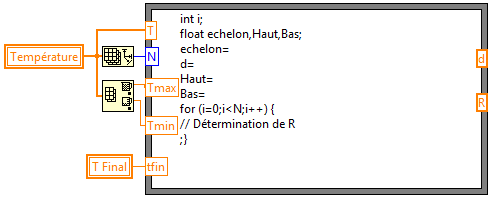
-
récupérer dans le tableau T : Tmin, Tmax et N (dimension du tableau)
-
demander à l'utilisateur de rentrer Tfinal à l'aide d'une commande
Ou calculer Tfinal à l'aide de la moyenne des températures une fois le transitoire terminé.
1) on repére Nmax l'indice de Tmax
2) on considère qu'à 2*Nmax le transitoire est terminé
3) on fait la moyenne du tableau sous-ensemble 2*Nmax à N :
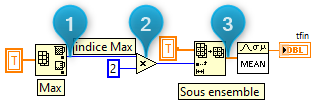
-
 Calculer
l'échelon, le dépassement d, l'erreur statique, Tfin+5%
et Tfin-5%
Calculer
l'échelon, le dépassement d, l'erreur statique, Tfin+5%
et Tfin-5% -
dans une boite de calcul balayer le tableau T à l'aide d'une boucle for(i=0;i<N;i++)
T[i] correspond à l'élément indice i dans le tableau T -
Si (T[i]<Tfin-5% ou T[i]>Tfin+5%) mémoriser l'indice i correspondant : R=i
-
Le dernier R mémorisé est le temps de réponse en s
(si le taux de rafraichissement est de 1 s sinon multiplier l'indice par le facteur d'échelle) -
Créer un noeud de propriété pour le graphe température
(faire un clic droit sur le graphe température : )
)
Prépositionner les curseurs aux valeurs calculées
Pour aller plus loin : la régulation PID :
I : action Intégrale, permet de supprimer l'erreur statique,
D : action dérivée, permet d'apporter de la stabilité lors du régime
transitoire et ainsi d'améliorer le temps de réponse.
Mais attention, l'action dérivée amplifie le
bruit ce qui apporte de l'instabilité.
Pour diminuer le bruit (erreur aléatoire..) nous
avons remplacé T par sa moyenne glissante sur les 4 dernières
mesures.
Vous pouvez télécharger ce VI qui a mémorisé la régulation avec plusieurs paramètres pour comparer l'action de ces paramètres....