





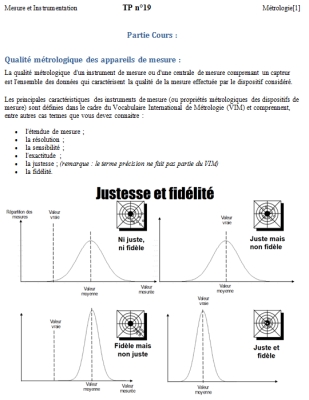
Fidélité, justesse, exactitude du capteur à ultrason HC-SR-04
Etude de la fidélitéQualité métrologique des appareils de mesure : Comment évaluer l’exactitude d’un appareil de mesure ? Incertitudes de type A. Etude des qualités métrologiques
d’un capteur à ultrason associé à un Arduino
Caractéristiques métrologiques Fidélité sous des conditions de répétabilité |
 |
 |
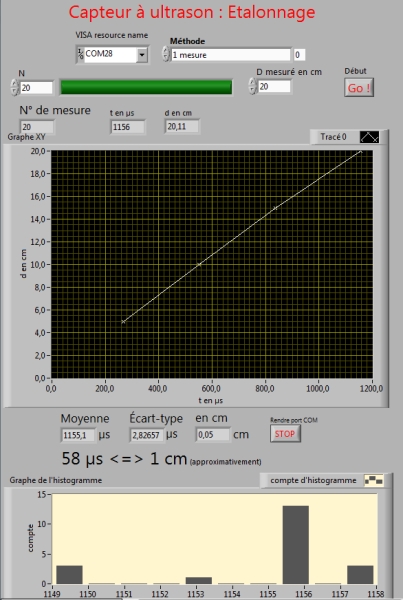
EtalonnageProtocole expérimental Courbe d'étalonnage Sensibilité du capteur Offset Vitesse du son Composition des incertitudes
|
 |
|

arduino code
01
02
03
04
05
06
07
08
09
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
02
03
04
05
06
07
08
09
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
int const Echo = 2; // Sortie du capteur HC-SR04 int const Trig = 3; // Commande (entrée) le début de la mesure int i =0; int car; unsigned long dt,T,t0; void setup() { pinMode(Trig, OUTPUT); pinMode(Echo, INPUT); Serial.begin(9600); } void loop() { car=Serial.read(); if (car==48) Mode0(); // 48 -> code ASCII de 0 if (car==49) Mode1(); // 49 -> code ASCII de 1 } void Mode0() { // durée 200 ms i=0; Mesure(); Serial.println(dt); } void Mode1() { // durée 800 ms : moyenne de 4 mesures T=0; for (i=0; i<4;i++) { Mesure(); if (dt==0) { Serial.println(dt); return;} T=T+dt; } dt=T/4; Serial.println(dt); } void Mesure() { // durée du programme 200 ms pour éviter les echos... digitalWrite(Trig, HIGH); delayMicroseconds(20); digitalWrite(Trig, LOW); t0=millis(); // Top début mesure dt = pulseIn(Echo, HIGH,200000); // Timeout 200000 µs = 200 ms while (millis()-t0<200); // Temps Mesure + attente = 200 ms }