





MPU6050 fonction moteur
 Cette
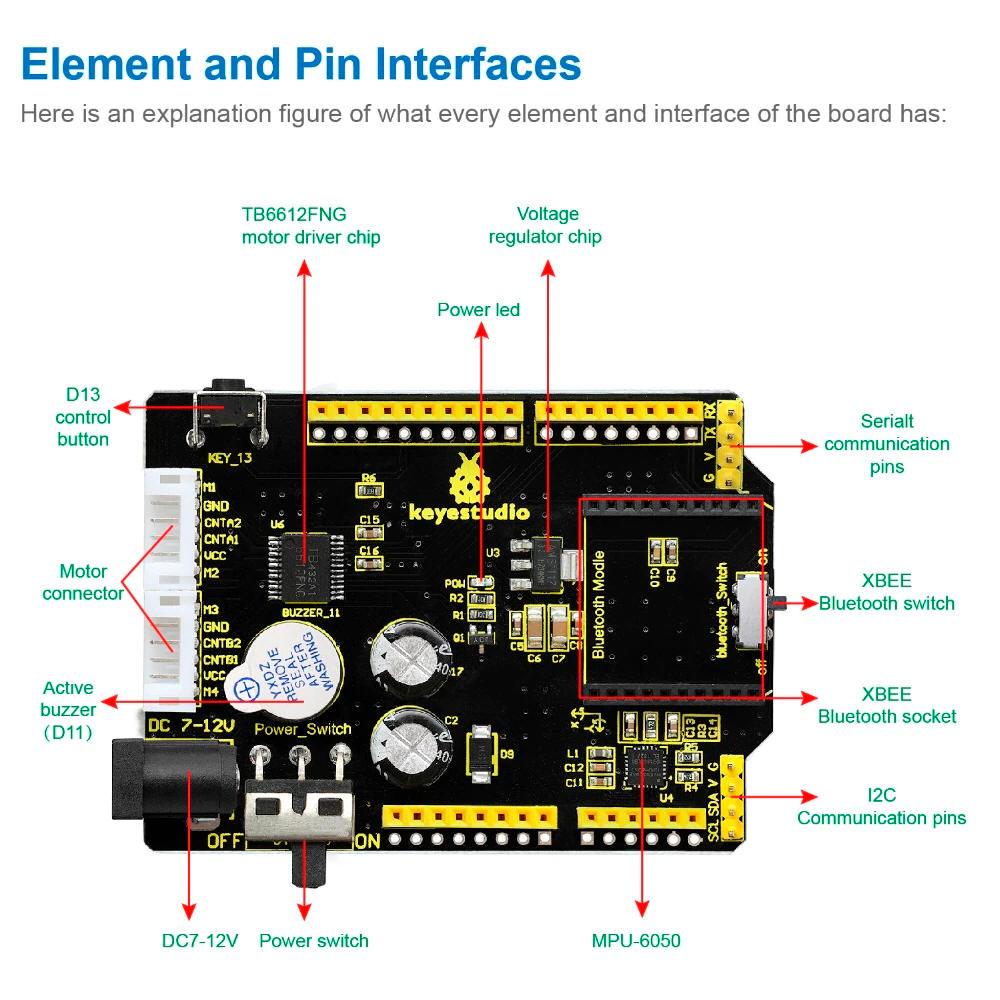
fonction utilise le shield Balance Car de Keyestudio.
Cette
fonction utilise le shield Balance Car de Keyestudio.
Placer les variables globales en début de programme,
et les fonctions dans un nouvel onglet :
![]()
// Variables Globales à placer au début du programme
const int right_R1=7; // Selon montage robot
const int right_R2=6; // droite et gauche peuvent être inversés
const int PWM_R=9;
const int left_L1=8;
const int left_L2=12;
const int PWM_L=10;
const int BP=13; // Bouton Poussoir shield V3
const int buz = 11; // set the buzzer pin
const int Hall_G_A1= 5; // Capteur effet Hall gauche A1 D5
const int Hall_G_A2 = 2; // B pour déterminer de sens de rotation
const int Hall_D_A1 = 4; // Capteur effet Hall droite A1 D4
const int Hall_D_A2 = 3;
float Kp=??,Kd=??; //Correction proportionnelle et dérivée
float consigne=-1; // Consigne 0° en théorie
int P,D,PWM ; // action Proportionnelle, Dérivée
bool balancing=false;
unsigned long t0;
long i, iBP, recu;
/* Pour plus de lisibilité placer les fonctions
dans un nouvel onglet fonction.*/
void iniPin(){
// Bouton Poussoir : commute balancing
pinMode(13,INPUT_PULLUP);
//set the control motor’s pin to OUTPUT
pinMode(right_R1,OUTPUT);
pinMode(right_R2,OUTPUT);
pinMode(left_L1,OUTPUT);
pinMode(left_L2,OUTPUT);
pinMode(PWM_R,OUTPUT);
pinMode(PWM_L,OUTPUT);
// pinMode(buz,OUTPUT); // commenté pour moins de bruit...
pinMode(Hall_G_A1,INPUT);
pinMode(Hall_G_A2,INPUT);
pinMode(Hall_D_A1,INPUT);
pinMode(Hall_D_A2,INPUT);
//Initial state value
digitalWrite(right_R1,1);
digitalWrite(right_R2,0);
digitalWrite(left_L1,0);
digitalWrite(left_L2,1);
analogWrite(PWM_R,0);
analogWrite(PWM_L,0);
}
 void moteur(int droite,int gauche) {
droite=-droite;gauche=-gauche; // Selon montage robot
if (droite> 255) droite= 255;
if (droite<-255) droite=-255;
if (gauche> 255) gauche= 255;
if (gauche<-255) gauche=-255;
if(angle_gyro>50 || angle_gyro<-50) {
droite=0;gauche=0; // Arrêt moteur si θ>50
balancing=false; }
if(gauche>=0) {
digitalWrite(left_L1,LOW);
digitalWrite(left_L2,HIGH);
analogWrite(PWM_L,gauche);}
else {
digitalWrite(left_L1,HIGH);
digitalWrite(left_L2,LOW);
analogWrite(PWM_L,-gauche);}
if(droite>=0){
digitalWrite(right_R1,LOW);
digitalWrite(right_R2,HIGH);
analogWrite(PWM_R,droite);}
else {
digitalWrite(right_R1,HIGH);
digitalWrite(right_R2,LOW);
analogWrite(PWM_R,-droite);}
}
void reception() { // Labview envoi : mode;consigne;Kp;Kd;
int mode=Serial.parseInt();
digitalWrite(buz,HIGH);
// Si on fonctionne en autonomie sans liaison série
// Rx potentiel flottant => reçoit des caractères aléatoires
// on ferme la liaison à la première erreur
if (mode<1 || mode>4){Serial.end();recu=i+20;return;}
recu=i;
consigne=Serial.parseFloat();
if (Serial.available()){
double x=Serial.parseFloat();
if (x>0) {Kp=x;Serial.print("0;0;0;0;Kp=");Serial.print(Kp);}}
if (Serial.available()){
double x=Serial.parseFloat();
if (x>0) {Kd=x;Serial.print(";Kd=");Serial.print(Kd);}}
Serial.println();
while (Serial.available()) Serial.read();
if (mode==1) {balancing=!balancing;}
if (mode==2) {balancing=true;}
if (mode==3) {balancing=false;}
}
void commute() { // Commute à chaque appui du Bouton Poussoir 13
iBP=i;recu=i;
balancing=!balancing; // de balancing à !balancing
digitalWrite(buz,HIGH);
}
void moteur(int droite,int gauche) {
droite=-droite;gauche=-gauche; // Selon montage robot
if (droite> 255) droite= 255;
if (droite<-255) droite=-255;
if (gauche> 255) gauche= 255;
if (gauche<-255) gauche=-255;
if(angle_gyro>50 || angle_gyro<-50) {
droite=0;gauche=0; // Arrêt moteur si θ>50
balancing=false; }
if(gauche>=0) {
digitalWrite(left_L1,LOW);
digitalWrite(left_L2,HIGH);
analogWrite(PWM_L,gauche);}
else {
digitalWrite(left_L1,HIGH);
digitalWrite(left_L2,LOW);
analogWrite(PWM_L,-gauche);}
if(droite>=0){
digitalWrite(right_R1,LOW);
digitalWrite(right_R2,HIGH);
analogWrite(PWM_R,droite);}
else {
digitalWrite(right_R1,HIGH);
digitalWrite(right_R2,LOW);
analogWrite(PWM_R,-droite);}
}
void reception() { // Labview envoi : mode;consigne;Kp;Kd;
int mode=Serial.parseInt();
digitalWrite(buz,HIGH);
// Si on fonctionne en autonomie sans liaison série
// Rx potentiel flottant => reçoit des caractères aléatoires
// on ferme la liaison à la première erreur
if (mode<1 || mode>4){Serial.end();recu=i+20;return;}
recu=i;
consigne=Serial.parseFloat();
if (Serial.available()){
double x=Serial.parseFloat();
if (x>0) {Kp=x;Serial.print("0;0;0;0;Kp=");Serial.print(Kp);}}
if (Serial.available()){
double x=Serial.parseFloat();
if (x>0) {Kd=x;Serial.print(";Kd=");Serial.print(Kd);}}
Serial.println();
while (Serial.available()) Serial.read();
if (mode==1) {balancing=!balancing;}
if (mode==2) {balancing=true;}
if (mode==3) {balancing=false;}
}
void commute() { // Commute à chaque appui du Bouton Poussoir 13
iBP=i;recu=i;
balancing=!balancing; // de balancing à !balancing
digitalWrite(buz,HIGH);
}